Respuesta Frecuencial de Sistemas lineales y SISO
import control as ctrl
import matplotlib.pyplot as plt
import numpy as np
Respuesta Frecuencial de Sistemas lineales y SISO ¶ Analicemos el paso de del dominio de Laplace al frecuencial. Para esto consideraremos el sistema lineal e invariante en el tiempo descripto por la función de transferencia:
H ( s ) = k ∏ j = 1 m ( s − z j ) ∏ i = 1 n ( s − p i ) H(s)= k \dfrac{\prod_{j=1}^{m}(s-z_j)}{\prod_{i=1}^{n}(s-p_i)} H ( s ) = k ∏ i = 1 n ( s − p i ) ∏ j = 1 m ( s − z j ) que por simplicidad consideraremos que p i p_i p i z j z_j z j
Nos interesa determinar la respuesta del sistema a una entrada de la forma (sinusoidal)
u ( t ) = U 0 sin ( ω t ) ⟹ U ( s ) = U 0 ω s 2 + ω 2 u(t)= U_0 \sin(\omega t) \Longrightarrow U(s)=\dfrac{U_0\omega}{s^2+\omega^2} u ( t ) = U 0 sin ( ω t ) ⟹ U ( s ) = s 2 + ω 2 U 0 ω Figure 1: Sistema H ( s ) H(s) H ( s )
asumiendo condiciones iniciales nulas
Y ( s ) = H ( s ) U ( s ) = k ∏ j = 1 m ( s − z j ) ∏ i = 1 n ( s − p i ) U 0 ω s 2 + ω 2 \begin{align*}
Y(s) = & H(s)U(s)\\
= & k \dfrac{\prod_{j=1}^{m}(s-z_j)}{\prod_{i=1}^{n}(s-p_i)}\dfrac{U_0\omega}{s^2+\omega^2}
\end{align*} Y ( s ) = = H ( s ) U ( s ) k ∏ i = 1 n ( s − p i ) ∏ j = 1 m ( s − z j ) s 2 + ω 2 U 0 ω expandiendo en fracciones parciales, se tiene
Y ( s ) = ∑ i = 1 n α i s − p i + α o s + j ω + α o ∗ s − j ω ⏟ ( 1 ) Y(s)=\sum_{i=1}^n \dfrac{\alpha_i}{s-p_i}+\underbrace{\dfrac{\alpha_o}{s+j\omega}+\dfrac{\alpha_o^*}{s-j\omega}}_{(1)} Y ( s ) = i = 1 ∑ n s − p i α i + ( 1 ) s + jω α o + s − jω α o ∗ donde el calculo de los residuos da:
α i = lim s → p i ( s − p i ) H ( s ) U 0 ω s 2 + ω 2 \alpha_i= \displaystyle\lim_{s \to{p_i}}{(s-p_i)H(s)\dfrac{U_0\omega}{s^2+\omega^2}} α i = s → p i lim ( s − p i ) H ( s ) s 2 + ω 2 U 0 ω α o = lim s → + j ω ( s − j ω ) H ( s ) U 0 ω ( s + j ω ) ( s − j ω ) = U 0 ω H ( − j ω ) − j 2 ω = j U 0 2 H ( − j ω ) \begin{align*}
\alpha_o &= \displaystyle\lim_{s \to{+j\omega}}{(s-j\omega)H(s)\dfrac{U_0\omega}{(s+j\omega)(s-j\omega)}}\\
&=\dfrac{U_0\omega H(-j\omega)}{-j2\omega}\\
&=j\dfrac{U_0}{2}H(-j\omega)
\end{align*} α o = s → + jω lim ( s − jω ) H ( s ) ( s + jω ) ( s − jω ) U 0 ω = − j 2 ω U 0 ω H ( − jω ) = j 2 U 0 H ( − jω ) α o ∗ = lim s → j ω ( s − j ω ) H ( s ) U 0 ω ( s + j ω ) ( s − j ω ) = U 0 ω H ( j ω ) j 2 ω = − j U 0 2 H ( j ω ) \begin{align*}
\alpha_o^* &= \displaystyle\lim_{s \to{j\omega}}{(s-j\omega)H(s)\dfrac{U_0\omega}{(s+j\omega)(s-j\omega)}}\\
&=\dfrac{U_0\omega H(j\omega)}{j2\omega}\\
&=-j\dfrac{U_0}{2}H(j\omega)
\end{align*} α o ∗ = s → jω lim ( s − jω ) H ( s ) ( s + jω ) ( s − jω ) U 0 ω = j 2 ω U 0 ω H ( jω ) = − j 2 U 0 H ( jω ) de ( 1 ) (1) ( 1 )
( 1 ) = α o ( s − j ω ) + α o ∗ ( s + j ω ) s 2 + ω 2 = s ( α o + α o ∗ ) + j ω ( α o + α o ∗ ) s 2 + ω 2 = − j U 0 2 [ H ( j ω ) − H ( − j ω ) ] s + U 0 2 ω [ H ( j ω ) + H ( − j ω ) ] s 2 + ω 2 \begin{align*}
(1)&= \dfrac{\alpha_o(s-j\omega)+\alpha_o^*(s+j\omega)}{s^2+\omega^2}=\dfrac{s(\alpha_o+\alpha_o^*)+j\omega(\alpha_o+\alpha_o^*)}{s^2+\omega^2}\\
&=\dfrac{-j\dfrac{U_0}{2}[H(j\omega)-H(-j\omega)]s+\dfrac{U_0}{2}\omega[H(j\omega)+H(-j\omega)]}{s^2+\omega^2}
\end{align*} ( 1 ) = s 2 + ω 2 α o ( s − jω ) + α o ∗ ( s + jω ) = s 2 + ω 2 s ( α o + α o ∗ ) + jω ( α o + α o ∗ ) = s 2 + ω 2 − j 2 U 0 [ H ( jω ) − H ( − jω )] s + 2 U 0 ω [ H ( jω ) + H ( − jω )] escribiendo
H ( j ω ) = ∣ H ( j ω ) ∣ e j ϕ ( ω ) H(j\omega) = |H(j\omega)| e^{j \phi(\omega)} H ( jω ) = ∣ H ( jω ) ∣ e j ϕ ( ω ) con ϕ ( ω ) = ∠ H ( j ω ) \phi (\omega)=\angle{H(j\omega)} ϕ ( ω ) = ∠ H ( jω )
por lo que:
( 1 ) = − j U 0 ∣ H ( j ω ) ∣ s ( e j ϕ ( ω ) − e − j ϕ ( ω ) ) 2 + U 0 ω ∣ H ( j ω ) ∣ ( e j ϕ ( ω ) + e − j ϕ ( ω ) ) 2 s 2 + ω 2 = U 0 ∣ H ( j ω ) ∣ [ s s 2 + ω 2 sin ( ϕ ( ω ) ) + ω s 2 + ω 2 cos ( ϕ ( ω ) ) ] \begin{matrix}
(1)&=& \dfrac{-jU_0 |H(j\omega)| s\dfrac{\big(e^{j \phi(\omega)}-e^{-j \phi(\omega)}\big)}{2} +U_0\omega|H(j\omega)|\dfrac{\big(e^{j \phi(\omega)}+e^{-j \phi(\omega)}\big)}{2} }{s^2+\omega^2}\\
&=& U_0 |H(j\omega)| \left[\dfrac{s}{s^2+\omega^2} \sin(\phi(\omega))+\dfrac{\omega}{s^2+\omega^2}\cos(\phi(\omega))\right]
\end{matrix} ( 1 ) = = s 2 + ω 2 − j U 0 ∣ H ( jω ) ∣ s 2 ( e j ϕ ( ω ) − e − j ϕ ( ω ) ) + U 0 ω ∣ H ( jω ) ∣ 2 ( e j ϕ ( ω ) + e − j ϕ ( ω ) ) U 0 ∣ H ( jω ) ∣ [ s 2 + ω 2 s sin ( ϕ ( ω )) + s 2 + ω 2 ω cos ( ϕ ( ω )) ] tomando la transformada inversa de Y ( s ) Y(s) Y ( s )
y ( t ) = ∑ i = 1 n α i e p i t + U 0 ∣ H ( j ω ) ∣ [ cos ( ω t ) sin ( ϕ ( ω ) ) + sin ( ω t ) cos ( ϕ ( ω ) ) ] y(t)= \sum_{i=1}^n{\alpha_i e^{p_i t}} +U_0 |H(j\omega)| \left[\cos(\omega t) \sin(\phi(\omega))+\sin(\omega t)\cos(\phi(\omega))\right] y ( t ) = i = 1 ∑ n α i e p i t + U 0 ∣ H ( jω ) ∣ [ cos ( ω t ) sin ( ϕ ( ω )) + sin ( ω t ) cos ( ϕ ( ω )) ] Lo anterior se puede escribir como:
y ( t ) = ∑ i = 1 n α i e p i t + U 0 ∣ H ( j ω ) ∣ sin ( ω t + ϕ ( ω ) ) ⏟ Forzada y(t)= \sum_{i=1}^n{\alpha_i e^{p_i t}} +\underbrace{U_0 |H(j\omega)| \sin(\omega t+\phi(\omega))}_{\text{Forzada}} y ( t ) = i = 1 ∑ n α i e p i t + Forzada U 0 ∣ H ( jω ) ∣ sin ( ω t + ϕ ( ω )) asumiendo que el sistema es BIBO estable, entonces
p 1 , p 2 , ⋯ , p n < 0 p_1,p_2,\cdots, p_n < 0 p 1 , p 2 , ⋯ , p n < 0 y el término de la respuesta transitoria
∑ i = 1 n α i e p i t ⟶ 0 con t ⟶ ∞ \sum_{i=1}^n{\alpha_i e^{p_i t}} \longrightarrow 0 \text{ con } t\longrightarrow \infty i = 1 ∑ n α i e p i t ⟶ 0 con t ⟶ ∞ Es decir, cuando t ⟶ ∞ t\longrightarrow \infty t ⟶ ∞
y R P S ( t ) = U 0 ∣ H ( j ω ) ∣ sin ( ω t + ϕ ( ω ) ) ⏟ Forzada y_{RPS}(t)=\underbrace{U_0 |H(j\omega)| \sin(\omega t+\phi(\omega))}_{\text{Forzada}} y RPS ( t ) = Forzada U 0 ∣ H ( jω ) ∣ sin ( ω t + ϕ ( ω )) Notar que:
H ( j ω ) ≡ H ( s ) ∣ s = j ω H(j\omega) \equiv \left.H(s)\right|_{s=j\omega} H ( jω ) ≡ H ( s ) ∣ s = jω se lo llama Transferencia Armónica o respuesta en Frecuencia del sistema. Su conocimiento para todo ω \omega ω
∣ H ( j ω ) ∣ ⟶ Amplitud ∠ H ( j ω ) ⟶ Fase \begin{matrix}
|H(j\omega)| \longrightarrow \text{ Amplitud}\\
\angle{H(j\omega)} \longrightarrow \text{ Fase}
\end{matrix} ∣ H ( jω ) ∣ ⟶ Amplitud ∠ H ( jω ) ⟶ Fase Los resultados se pueden extender al caso de tener polos complejos conjugados y con multiplicidad. Siempre con la condición que sean estables, es decir R e ( p i ) < 0 \mathbb{Re}(p_i)<0 R e ( p i ) < 0
Diagrama de Bode ¶ Lo que se hace normalmente es graficar la respuesta frecuencial del sistema. Para esto se usa que:
H ( ω ) = ∣ H ( ω ) ∣ ⏟ m o ˊ dulo e j ∠ H ( ω ) H(\omega) = \underbrace{|H(\omega)|}_{\text{módulo}} e^{j\angle{H(\omega)}} H ( ω ) = m o ˊ dulo ∣ H ( ω ) ∣ e j ∠ H ( ω ) ∣ H ( ω ) ∣ |H(\omega)| ∣ H ( ω ) ∣ H ( ω ) H(\omega) H ( ω ) ∠ H ( ω ) \angle{H(\omega)} ∠ H ( ω )
Se suele graficar la respuesta de H ( ω ) H(\omega) H ( ω )
∣ H ( j ω ) ∣ d B = 20 log ∣ H ( j ω ) ∣ vs log w ∠ H ( j ω ) vs log w \begin{matrix}
|H(j\omega)|_{dB} = 20 \log{|H(j\omega)|} & \text{vs}&\log{w}\\
\angle{H(j\omega)} &\text{vs}&\log{w}
\end{matrix} ∣ H ( jω ) ∣ d B = 20 log ∣ H ( jω ) ∣ ∠ H ( jω ) vs vs log w log w Sin perder generalidad podremos considerar que p i p_i p i z j z_j z j
G ( s ) = k ∏ j = 1 m ( τ z j s + 1 ) ∏ i = 1 n ( τ p i s + 1 ) G(s)= k \dfrac{\prod_{j=1}^{m}(\tau_{z_j}s+1)}{\prod_{i=1}^{n}(\tau_{p_i}s+1)} G ( s ) = k ∏ i = 1 n ( τ p i s + 1 ) ∏ j = 1 m ( τ z j s + 1 ) expresado como la función transferencia armónica:
H ( ω ) = k ∏ j = 1 m ( j τ z j ω + 1 ) ∏ i = 1 n ( j τ p i ω + 1 ) = k ∏ j = 1 m r z j e j θ z j ∏ i = 1 n r p i e j θ p i H(\omega)= k \dfrac{\prod_{j=1}^{m}(j\tau_{z_j}\omega+1)}{\prod_{i=1}^{n}(j\tau_{p_i}\omega+1)}= k \dfrac{\prod_{j=1}^{m}r_{z_j}e^{j\theta_{z_j}}}{\prod_{i=1}^{n}r_{p_i}e^{j\theta_{p_i}}} H ( ω ) = k ∏ i = 1 n ( j τ p i ω + 1 ) ∏ j = 1 m ( j τ z j ω + 1 ) = k ∏ i = 1 n r p i e j θ p i ∏ j = 1 m r z j e j θ z j con lo que:
∣ G ( j ω ) ∣ = k ∏ j = 1 m r z j ( ω ) ∏ i = 1 n r p i ( ω ) |G(j\omega)| = \dfrac{k\prod_{j=1}^{m}r_{z_j}(\omega)}{\prod_{i=1}^{n}r_{p_i}(\omega)} ∣ G ( jω ) ∣ = ∏ i = 1 n r p i ( ω ) k ∏ j = 1 m r z j ( ω ) ∠ G ( j ω ) = e j ( ∑ j m θ z j ( ω ) − ∑ i n θ p i ( ω ) ) \angle{G(j\omega)} = e^{j\big(\sum_{j}^{m}\theta_{z_j}(\omega)-\sum_{i}^{n}\theta_{p_i}(\omega)\big)} ∠ G ( jω ) = e j ( ∑ j m θ z j ( ω ) − ∑ i n θ p i ( ω ) ) Finalmente, por propiedades de los logaritmos, el módulo en dB se determina sumando los módulos individuales de los polos y ceros para cada frecuencia.
∣ G ( j ω ) ∣ = ∣ k ∣ d B ⏟ 20 log ( k ) + ∑ 1 m r z j ( ω ) ⏟ 20 log ( r z j ( ω ) ) + ∑ 1 n 1 r p i ( ω ) ⏟ 20 log ( 1 r p i ( ω ) ) |G(j\omega)| = \underbrace{|k|_{dB}}_{20\log{(k)}} + \underbrace{\sum_{1}^{m} r_{z_j}(\omega)}_{20\log{\big(r_{z_j}(\omega)\big)}} +
\underbrace{\sum_{1}^{n} \dfrac{1}{r_{p_i}(\omega)}}_{20\log{\big(\dfrac{1}{r_{p_i}(\omega)}}\big)} ∣ G ( jω ) ∣ = 20 l o g ( k ) ∣ k ∣ d B + 20 l o g ( r z j ( ω ) ) 1 ∑ m r z j ( ω ) + 20 l o g ( r p i ( ω ) 1 ) 1 ∑ n r p i ( ω ) 1 y la fase se obtiene sumando las fases de los polos y ceros en forma individual para cada frecuencia w.
∠ G ( j ω ) = ∠ k + ∑ θ z j ( ω ) − ∑ θ p i ( ω ) \angle{G(j\omega)} = \angle{k} +\sum{\theta_{z_j}(\omega)}- \sum{\theta_{p_i}(\omega)} ∠ G ( jω ) = ∠ k + ∑ θ z j ( ω ) − ∑ θ p i ( ω ) El resultado anterior nos permite graficar un diagrama de Bode a partir de diagramas de Bode de sistemas mas simples. Analizaremos cada una de estas opciones tanto para polos como para ceros.
Método práctico para graficar diagramas de Bode ¶ 1) Polo simple en el origen ¶ G ( s ) = 1 s H ( ω ) = 1 j ω polo en s = 0 \begin{matrix}
G(s)=\dfrac{1}{s} & H(\omega)= \dfrac{1}{j\omega} & \text{polo en} & s=0
\end{matrix} G ( s ) = s 1 H ( ω ) = jω 1 polo en s = 0 Polo en 0
el módulo resulta
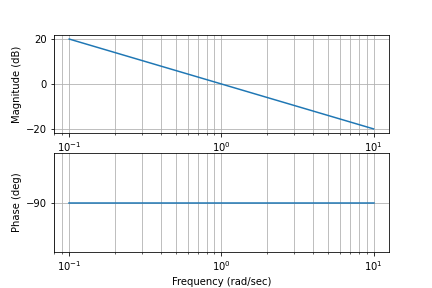
∣ G ( j ω ) ∣ = 1 ω ⟹ ∣ G ( j ω ) ∣ d B = − 20 log ω ⏟ Ecuaci o ˊ n de una recta con pendiente de -20dB/dec (con ω en forma logar ı ˊ tmico) |G(j\omega)| = \dfrac{1}{\omega} \Longrightarrow \underbrace{|G(j\omega)|_{dB} = - 20 \log{\omega}}_{\substack{\text{Ecuación de una recta}\\ \text{con pendiente de -20dB/dec}\\ \text{(con } \omega \text{ en forma logarítmico)}}} ∣ G ( jω ) ∣ = ω 1 ⟹ Ecuaci o ˊ n de una recta con pendiente de -20dB/dec (con ω en forma logar ı ˊ tmico) ∣ G ( jω ) ∣ d B = − 20 log ω para frecuencia ω = 1 r a d s e g \omega = 1 \dfrac{rad}{seg} ω = 1 se g r a d
∣ G ( j ω ) ∣ ω = 1 r a d s e g = 0 d B |G(j\omega)|_{\omega = 1 \dfrac{rad}{seg}} = 0 dB ∣ G ( jω ) ∣ ω = 1 se g r a d = 0 d B y la fase resulta
∠ G ( j ω ) = − π 2 ∀ ω \angle{G(j\omega)} = -\dfrac{\pi}{2} ~\forall~ \omega ∠ G ( jω ) = − 2 π ∀ ω Bode de G ( s ) = 1 s G(s)=\dfrac{1}{s} G ( s ) = s 1
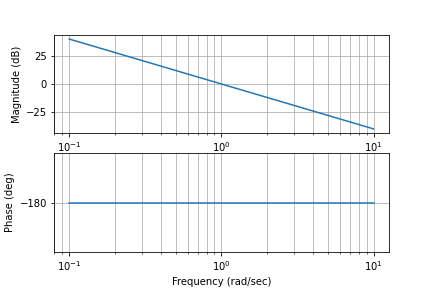
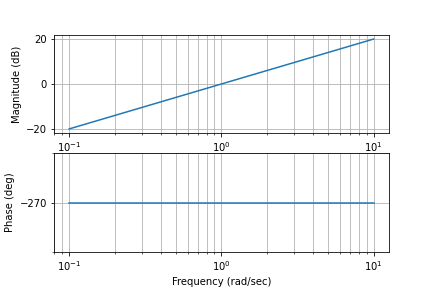
2) Polo múltiple en el origen ¶ G ( s ) = 1 s n G ( j ω ) = 1 j n ω n n polos en s = 0 \begin{matrix}
G(s)=\dfrac{1}{s^n} & G(j\omega)= \dfrac{1}{j^n\omega^n} & \text{n polos en} & s=0
\end{matrix} G ( s ) = s n 1 G ( jω ) = j n ω n 1 n polos en s = 0 Polos de G ( s ) G(s) G ( s ) s = 0 s=0 s = 0 n n n
el módulo resulta
∣ G ( j ω ) ∣ = 1 ω n ⟹ ∣ G ( j ω ) ∣ d B = − 20 n ⏟ Solo cambia la pendiente en funci o ˊ n de la multiplicidad "n" log ω |G(j\omega)| = \dfrac{1}{\omega^n} \Longrightarrow |G(j\omega)|_{dB} = \underbrace{-20~n}_{
\substack
{\text{Solo cambia la pendiente en función}\\
\text{de la multiplicidad "n"}}
}\log{\omega} ∣ G ( jω ) ∣ = ω n 1 ⟹ ∣ G ( jω ) ∣ d B = Solo cambia la pendiente en funci o ˊ n de la multiplicidad "n" − 20 n log ω para frecuencia ω = 1 r a d s e g \omega = 1 \dfrac{rad}{seg} ω = 1 se g r a d
∣ G ( j ω ) ∣ ω = 1 r a d s e g = 0 d B |G(j\omega)|_{\omega = 1 \dfrac{rad}{seg}} = 0 dB ∣ G ( jω ) ∣ ω = 1 se g r a d = 0 d B y la fase resulta
∠ G ( j ω ) = − n π 2 ∀ ω \angle{G(j\omega)} = -n \dfrac{\pi}{2} ~\forall~ \omega ∠ G ( jω ) = − n 2 π ∀ ω Bode cuando n=2, es decir G ( s ) = 1 s 2 G(s)=\dfrac{1}{s^2} G ( s ) = s 2 1
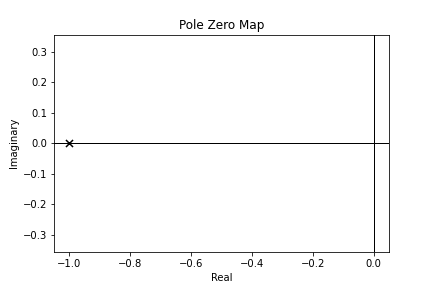
3) Polo real simple ¶ G ( s ) = 1 τ s + 1 H ( ω ) = G ( j ω ) = 1 j ω τ + 1 polo en s = − 1 τ \begin{matrix}
G(s)=\dfrac{1}{\tau s+1} & H(\omega)= G(j\omega)= \dfrac{1}{j\omega\tau+1} & \text{polo en} & s=-\dfrac{1}{\tau}
\end{matrix} G ( s ) = τ s + 1 1 H ( ω ) = G ( jω ) = jω τ + 1 1 polo en s = − τ 1 Polo de G ( s ) G(s) G ( s ) s = − 1 / τ s=-1/\tau s = − 1/ τ
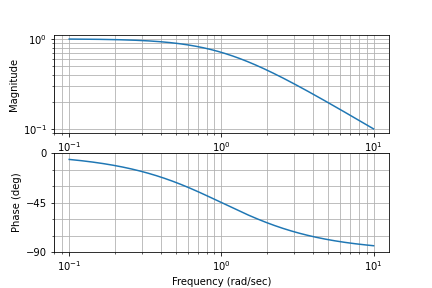
el módulo resulta
∣ G ( j ω ) ∣ = 1 1 + ω 2 τ 2 ⟹ ∣ G ( j ω ) ∣ d B = − 10 log ( 1 + ω 2 τ 2 ) |G(j\omega)| = \dfrac{1}{\sqrt{1+\omega^2\tau^2}} \Longrightarrow |G(j\omega)|_{dB} = - 10 \log{(1+\omega^2\tau^2)} ∣ G ( jω ) ∣ = 1 + ω 2 τ 2 1 ⟹ ∣ G ( jω ) ∣ d B = − 10 log ( 1 + ω 2 τ 2 ) cuando ω ⟶ 0 \omega \longrightarrow 0 ω ⟶ 0
∣ G ( j ω ) ∣ d B ≈ 0 d B |G(j\omega)|_{dB} \approx 0 dB ∣ G ( jω ) ∣ d B ≈ 0 d B para ω ⟶ ∞ \omega \longrightarrow \infty ω ⟶ ∞
∣ G ( j ω ) ∣ d B ≈ − 10 log ( ω 2 τ 2 ) = − 20 log ( ω ) − 20 log ( τ ) ⏟ Ecuaci o ˊ n de una recta en 0 dB para ω = 1 τ |G(j\omega)|_{dB} \approx -10 \log(\omega^2\tau^2) = \underbrace{-20\log(\omega)-20\log(\tau)}_{\substack
{\text{Ecuación de una recta}\\
\text{en 0 dB para } \omega=\dfrac{1}{\tau}
}} ∣ G ( jω ) ∣ d B ≈ − 10 log ( ω 2 τ 2 ) = Ecuaci o ˊ n de una recta en 0 dB para ω = τ 1 − 20 log ( ω ) − 20 log ( τ ) Notar que para ω = 1 τ \omega=\dfrac{1}{\tau} ω = τ 1
∣ G ( j ω ) ∣ d B ω = 1 τ = − 10 log ( 1 + 1 ) = − 3 d B {|G(j\omega)|_{dB}}_{\omega=\dfrac{1}{\tau}} = -10 \log(1+1) = -3dB ∣ G ( jω ) ∣ d B ω = τ 1 = − 10 log ( 1 + 1 ) = − 3 d B la fase resulta ser:
∠ G ( j ω ) = arctan ( − ω τ ) = { ∠ G ( j ω ) → 0 cuando ω → 0 ∠ G ( j ω ) → − π 2 cuando ω → ∞ ∠ G ( j ω ) ∣ ω = 1 τ = − π 4 \angle{G(j\omega)} = \arctan(-\omega\tau)= \left\{
\begin{array}{l}
\angle{G(j\omega)} \rightarrow 0 \text{ cuando } \omega\rightarrow 0 \\
\angle{G(j\omega)} \rightarrow -\dfrac{\pi}{2} \text{ cuando }\omega\rightarrow\infty \\
\left.\angle{G(j\omega)}\right|_{\omega=\dfrac{1}{\tau}} = -\dfrac{\pi}{4}
\end{array}\right. ∠ G ( jω ) = arctan ( − ω τ ) = ⎩ ⎨ ⎧ ∠ G ( jω ) → 0 cuando ω → 0 ∠ G ( jω ) → − 2 π cuando ω → ∞ ∠ G ( jω ) ∣ ω = τ 1 = − 4 π Bode de G ( s ) = 1 τ s + 1 G(s)=\dfrac{1}{\tau s+1} G ( s ) = τ s + 1 1 τ = 1 \tau=1 τ = 1
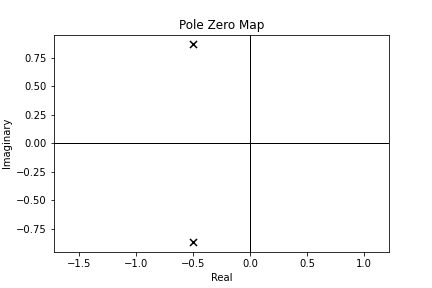
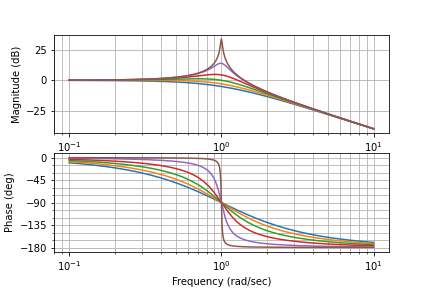
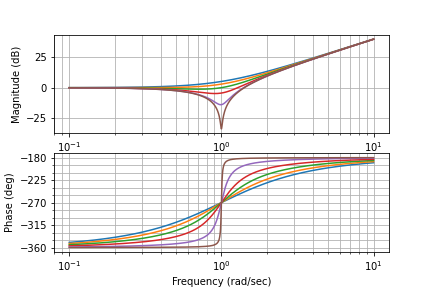
4) Par de polos complejo conjugado ¶ G ( s ) = ω n 2 s 2 + 2 ξ ω n s + ω n 2 G(s)=\dfrac{\omega_n^2}{s^2+2\xi\omega_ns+\omega_n^2} G ( s ) = s 2 + 2 ξ ω n s + ω n 2 ω n 2 donde ξ \xi ξ ω n \omega_n ω n p 1 , 2 = − ξ ω n ± ω n ξ 2 − 1 ⏟ complejos conjugados \underbrace{p_{1,2}=-\xi\omega_n\pm \omega_n\sqrt{\xi^2-1}}_{\text{complejos conjugados}} complejos conjugados p 1 , 2 = − ξ ω n ± ω n ξ 2 − 1 0 < ξ < 1 0<\xi<1 0 < ξ < 1 ∣ p 1 , 2 ∣ = ω n |p_{1,2}|=\omega_n ∣ p 1 , 2 ∣ = ω n
Polo complejos conjugados de G ( s ) G(s) G ( s ) ω n = 1 \omega_n=1 ω n = 1 ξ = 0.5 \xi=0.5 ξ = 0.5
H ( ω ) = G ( j ω ) = ω n 2 − ω n 2 + j 2 ξ ω n ω + ω n 2 = 1 ( 1 − ω 2 ω n 2 ) + j 2 ξ ω ω n H(\omega)= G(j\omega)= \dfrac{\omega_n^2}{-\omega_n^2+j2\xi\omega_n\omega+\omega_n^2} =\dfrac{1}{\big(1-\dfrac{\omega^2}{\omega_n^2}\big)+j2\xi\dfrac{\omega}{\omega_n}} H ( ω ) = G ( jω ) = − ω n 2 + j 2 ξ ω n ω + ω n 2 ω n 2 = ( 1 − ω n 2 ω 2 ) + j 2 ξ ω n ω 1 el módulo es
∣ G ( j ω ) ∣ = 1 ( 1 − ω 2 ω n 2 ) 2 + 4 ξ 2 ω 2 ω n 2 |G(j\omega)| = \dfrac{1}{\sqrt{\big(1-\dfrac{\omega^2}{\omega_n^2}\big)^2+4\xi^2\dfrac{\omega^2}{\omega_n^2}}} ∣ G ( jω ) ∣ = ( 1 − ω n 2 ω 2 ) 2 + 4 ξ 2 ω n 2 ω 2 1 ∣ G ( j ω ) ∣ ∣ d B = − 10 log ( ( 1 − ω 2 ω n 2 ) 2 + 4 ξ 2 ω 2 ω n 2 ) \left.|G(j\omega)|\right|_{dB} = -10\log\left(\left(1-\dfrac{\omega^2}{\omega_n^2}\right)^2+4\xi^2\dfrac{\omega^2}{\omega_n^2}\right) ∣ G ( jω ) ∣ ∣ d B = − 10 log ( ( 1 − ω n 2 ω 2 ) 2 + 4 ξ 2 ω n 2 ω 2 ) cuando ω ⟶ 0 \omega \longrightarrow 0 ω ⟶ 0
∣ G ( j ω ) ∣ d B ≈ 0 d B |G(j\omega)|_{dB} \approx 0 dB ∣ G ( jω ) ∣ d B ≈ 0 d B y para ω ⟶ ∞ \omega \longrightarrow \infty ω ⟶ ∞
∣ G ( j ω ) ∣ d B ≈ − 10 log ( ω 4 ω n 4 ) = − 40 log ( ω ) + 40 log ( ω n ) ⏟ Ecuaci o ˊ n de una recta con pendiente -40dB/dec que corta el eje en 0 dB para ω = ω n |G(j\omega)|_{dB} \approx -10 \log\big(\dfrac{\omega^4}{\omega_n^4}\big) = \underbrace{-40\log(\omega)+40\log(\omega_n)}_{\substack
{\text{Ecuación de una recta}\\
\text{con pendiente -40dB/dec}\\
\text{que corta el eje}\\
\text{en 0 dB para } \omega=\omega_n
}} ∣ G ( jω ) ∣ d B ≈ − 10 log ( ω n 4 ω 4 ) = Ecuaci o ˊ n de una recta con pendiente -40dB/dec que corta el eje en 0 dB para ω = ω n − 40 log ( ω ) + 40 log ( ω n ) El módulo para ω = ω n \omega=\omega_n ω = ω n
∣ G ( j ω ) ∣ d B ω = ω n = − 10 log ( 4 ξ 2 ) = − 6 d B − 20 log ( ξ ) {|G(j\omega)|_{dB}}_{\omega=\omega_n} = -10 \log(4\xi^2) = -6dB -20\log(\xi) ∣ G ( jω ) ∣ d B ω = ω n = − 10 log ( 4 ξ 2 ) = − 6 d B − 20 log ( ξ ) la fase es:
∠ G ( j ω ) = arctan ( − 2 ξ ω ω n ( 1 − ω 2 ω n 2 ) ) = { → 0 cuando ω → 0 → − π cuando ω → ∞ = − π 2 para ω = ω n \angle{G(j\omega)} = \arctan\bigg(-\dfrac{2\xi\dfrac{\omega}{\omega_n}}{(1-\dfrac{\omega^2}{\omega_n^2})}\bigg)= \left\{
\begin{array}{l}
\rightarrow 0 \text{ cuando } \omega\rightarrow0\\
\rightarrow -\pi \text{ cuando } \omega\rightarrow\infty\\
= -\dfrac{\pi}{2} \text{ para } \omega=\omega_n
\end{array}\right. ∠ G ( jω ) = arctan ( − ( 1 − ω n 2 ω 2 ) 2 ξ ω n ω ) = ⎩ ⎨ ⎧ → 0 cuando ω → 0 → − π cuando ω → ∞ = − 2 π para ω = ω n Bode de G ( s ) G(s) G ( s ) ω n = 1 \omega_n=1 ω n = 1 ξ = 0.9 , 0.7 , 0.5 , 0.3 , 0.1 , 0.01 \xi= 0.9,0.7,0.5,0.3,0.1,0.01 ξ = 0.9 , 0.7 , 0.5 , 0.3 , 0.1 , 0.01
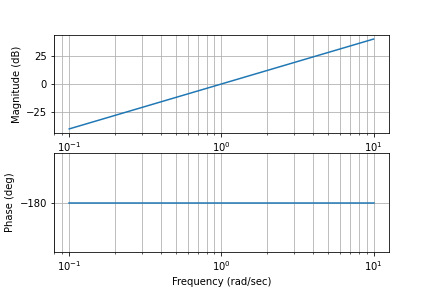
5) Cero simple en el origen ¶ G ( s ) = s H ( ω ) = j ω un cero en s = 0 \begin{matrix}
G(s)=s & H(\omega)= {j\omega} & \text{un cero en} & s=0
\end{matrix} G ( s ) = s H ( ω ) = jω un cero en s = 0 Cero de G ( s ) G(s) G ( s ) s = 0 s=0 s = 0
el módulo resulta
∣ G ( j ω ) ∣ = ω ⟹ ∣ G ( j ω ) ∣ d B = 20 log ω ⏟ recta con pendiente de 20dB/dec |G(j\omega)| = {\omega} \Longrightarrow \underbrace{|G(j\omega)|_{dB} = 20\log{\omega}}_{\substack{\text{recta con}\\ \text{pendiente de 20dB/dec}}} ∣ G ( jω ) ∣ = ω ⟹ recta con pendiente de 20dB/dec ∣ G ( jω ) ∣ d B = 20 log ω para
∣ G ( j ω ) ∣ ω = 1 r a d s e g = 0 d B |G(j\omega)|_{\omega = 1 \dfrac{rad}{seg}} = 0 dB ∣ G ( jω ) ∣ ω = 1 se g r a d = 0 d B la fase ∠ G ( j ω ) = π 2 ∀ ω \angle{G(j\omega)} = \dfrac{\pi}{2} ~\forall~ \omega ∠ G ( jω ) = 2 π ∀ ω
Bode de G ( s ) = s G(s)={s} G ( s ) = s
6) Ceros múltiples en el origen ¶ G ( s ) = s n G ( j ω ) = j n ω n n ceros en s = 0 \begin{align*}
G(s)={s^n} & G(j\omega)= {j^n\omega^n} & \text{n ceros en } & s=0
\end{align*} G ( s ) = s n G ( jω ) = j n ω n n ceros en s = 0 Ceros de G ( s ) G(s) G ( s ) s = 0 s=0 s = 0
el módulo resulta
∣ G ( j ω ) ∣ = ω n ⟹ ∣ G ( j ω ) ∣ d B = 20 n log ω ⏟ Solo cambia la pendiente en funci o ˊ n de la multiplicidad "n" |G(j\omega)| = {\omega^n} \Longrightarrow \underbrace{|G(j\omega)|_{dB} = 20~n\log{\omega}}_{
\substack
{\text{Solo cambia la pendiente en función}\\
\text{de la multiplicidad "n"}}
} ∣ G ( jω ) ∣ = ω n ⟹ Solo cambia la pendiente en funci o ˊ n de la multiplicidad "n" ∣ G ( jω ) ∣ d B = 20 n log ω sigue valiendo ∣ G ( j ω ) ∣ ω = 1 r a d s e g = 0 d B |G(j\omega)|_{\omega = 1 \dfrac{rad}{seg}} = 0 dB ∣ G ( jω ) ∣ ω = 1 se g r a d = 0 d B
y la fase resulta
∠ G ( j ω ) = n π 2 ∀ ω \angle{G(j\omega)} = n \dfrac{\pi}{2} ~\forall~ \omega ∠ G ( jω ) = n 2 π ∀ ω Bode cuando n=2, es decir G ( s ) = s 2 G(s)={s^2} G ( s ) = s 2
7) Cero real simple ¶ G ( s ) = τ s + 1 H ( ω ) = G ( j ω ) = j ω τ + 1 un cero en s = − 1 τ \begin{matrix}
G(s)={\tau s+1} & H(\omega)= G(j\omega)= {j\omega\tau+1} & \text{ un cero en } & s=-\dfrac{1}{\tau}
\end{matrix} G ( s ) = τ s + 1 H ( ω ) = G ( jω ) = jω τ + 1 un cero en s = − τ 1 Cero de G ( s ) G(s) G ( s ) s = − 1 / τ s=-1/\tau s = − 1/ τ
el módulo resulta
∣ G ( j ω ) ∣ = 1 + ω 2 τ 2 ⟹ ∣ G ( j ω ) ∣ d B = 10 log ( 1 + ω 2 τ 2 ) |G(j\omega)| = {\sqrt{1+\omega^2\tau^2}} \Longrightarrow |G(j\omega)|_{dB} = 10\log{(1+\omega^2\tau^2)} ∣ G ( jω ) ∣ = 1 + ω 2 τ 2 ⟹ ∣ G ( jω ) ∣ d B = 10 log ( 1 + ω 2 τ 2 ) cuando ω ⟶ 0 \omega \longrightarrow 0 ω ⟶ 0
∣ G ( j ω ) ∣ d B ≈ 0 d B |G(j\omega)|_{dB} \approx 0 dB ∣ G ( jω ) ∣ d B ≈ 0 d B para ω ⟶ ∞ \omega \longrightarrow \infty ω ⟶ ∞
∣ G ( j ω ) ∣ d B ≈ 10 log ( ω 2 τ 2 ) = 20 log ( ω ) + 20 log ( τ ) ⏟ Ecuaci o ˊ n de una recta con pendiente 20dB/dec que corta el eje en 0 dB para ω = 1 τ |G(j\omega)|_{dB} \approx 10\log(\omega^2\tau^2) = \underbrace{20\log(\omega)+20\log(\tau)}_{\substack
{\text{Ecuación de una recta}\\
\text{con pendiente 20dB/dec}\\
\text{que corta el eje}\\
\text{en 0 dB para } \omega=\dfrac{1}{\tau}
}} ∣ G ( jω ) ∣ d B ≈ 10 log ( ω 2 τ 2 ) = Ecuaci o ˊ n de una recta con pendiente 20dB/dec que corta el eje en 0 dB para ω = τ 1 20 log ( ω ) + 20 log ( τ ) para ω = 1 τ \omega=\dfrac{1}{\tau} ω = τ 1
∣ G ( j ω ) ∣ d B ω = 1 τ = 10 log ( 2 ) = 3 d B {|G(j\omega)|_{dB}}_{\omega=\dfrac{1}{\tau}} = 10\log(2) = 3dB ∣ G ( jω ) ∣ d B ω = τ 1 = 10 log ( 2 ) = 3 d B la fase resulta ser:
∠ G ( j ω ) = arctan ( ω τ ) = { → 0 cuando ω → 0 → π 2 cuando ω → ∞ = π 4 con ω = 1 τ \angle{G(j\omega)} = \arctan(\omega\tau)= \left\{
\begin{array}{l}
\rightarrow 0 \text{ cuando } \omega\rightarrow0\\
\rightarrow \dfrac{\pi}{2} \text{ cuando } \omega\rightarrow\infty\\
=\dfrac{\pi}{4}\text{ con }\omega=\dfrac{1}{\tau}
\end{array}\right. ∠ G ( jω ) = arctan ( ω τ ) = ⎩ ⎨ ⎧ → 0 cuando ω → 0 → 2 π cuando ω → ∞ = 4 π con ω = τ 1 Bode de G ( s ) = τ s + 1 G(s)={\tau s+1} G ( s ) = τ s + 1 τ = 1 \tau=1 τ = 1
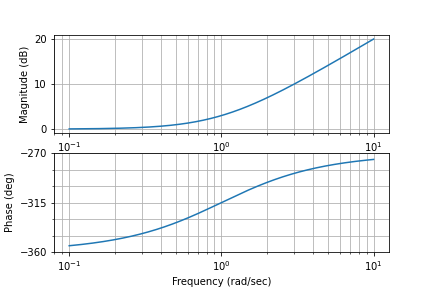
8) Cero complejo conjugado ¶ De forma similar a lo resuelto para los polos complejos conjugados, se puede llegar a que la respuesta en frecuencia de la siguiente función de transferencia con un para de ceros complejos conjugados normalizada en ganancia, es:
G ( s ) = s 2 + 2 ξ ω n s + ω n 2 ω n 2 G(s)=\dfrac{s^2+2\xi\omega_ns+\omega_n^2}{\omega_n^2} G ( s ) = ω n 2 s 2 + 2 ξ ω n s + ω n 2 Bode de G ( s ) G(s) G ( s ) ω n = 1 \omega_n=1 ω n = 1 ξ = 0.9 , 0.7 , 0.5 , 0.3 , 0.1 , 0.01 \xi= 0.9,0.7,0.5,0.3,0.1,0.01 ξ = 0.9 , 0.7 , 0.5 , 0.3 , 0.1 , 0.01
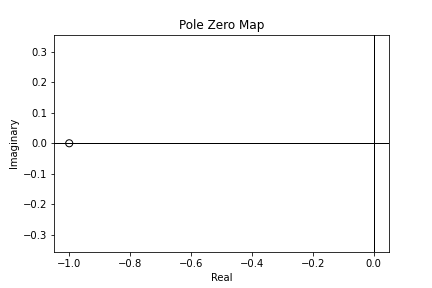
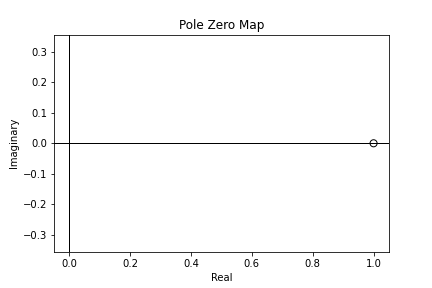
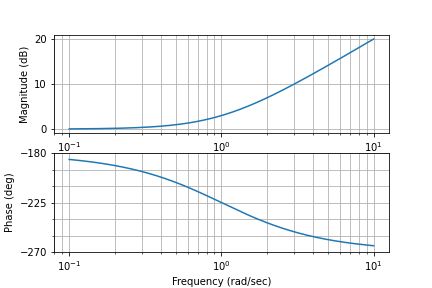
9) Cero simple de no mínima fase ¶ G ( s ) = 1 − τ s H ( ω ) = G ( j ω ) = 1 − j ω τ un cero en s = 1 τ \begin{matrix}
G(s)={1-\tau s} & H(\omega)= G(j\omega)= {1-j\omega\tau} & \text{un cero en } & s=\dfrac{1}{\tau}
\end{matrix} G ( s ) = 1 − τ s H ( ω ) = G ( jω ) = 1 − jω τ un cero en s = τ 1 Cero de G ( s ) G(s) G ( s ) s = 1 / τ s=1/\tau s = 1/ τ C + \mathbb{C}^+ C +
el módulo resulta
∣ G ( j ω ) ∣ = 1 + ω 2 τ 2 ⟹ ∣ G ( j ω ) ∣ d B = 10 log ( 1 + ω 2 τ 2 ) |G(j\omega)| = {\sqrt{1+\omega^2\tau^2}} \Longrightarrow |G(j\omega)|_{dB} = 10\log{(1+\omega^2\tau^2)} ∣ G ( jω ) ∣ = 1 + ω 2 τ 2 ⟹ ∣ G ( jω ) ∣ d B = 10 log ( 1 + ω 2 τ 2 ) cuando ω ⟶ 0 \omega \longrightarrow 0 ω ⟶ 0
∣ G ( j ω ) ∣ d B ≈ 0 d B |G(j\omega)|_{dB} \approx 0 dB ∣ G ( jω ) ∣ d B ≈ 0 d B para ω ⟶ ∞ \omega \longrightarrow \infty ω ⟶ ∞
∣ G ( j ω ) ∣ d B ≈ 10 log ( ω 2 τ 2 ) = 20 log ( ω ) + 20 log ( τ ) ⏟ Una recta con pendiente 20dB/dec al igual que para el cero en C − |G(j\omega)|_{dB} \approx 10\log(\omega^2\tau^2) = \underbrace{20\log(\omega)+20\log(\tau)}_{\substack
{\text{Una recta con}\\
\text{pendiente 20dB/dec}\\
\text{al igual que para}\\
\text{el cero en } \mathbb{C}^-
}} ∣ G ( jω ) ∣ d B ≈ 10 log ( ω 2 τ 2 ) = Una recta con pendiente 20dB/dec al igual que para el cero en C − 20 log ( ω ) + 20 log ( τ ) para ω = 1 τ \omega=\dfrac{1}{\tau} ω = τ 1
∣ G ( j ω ) ∣ d B ω = 1 τ = 10 log ( 2 ) = 3 d B {|G(j\omega)|_{dB}}_{\omega=\dfrac{1}{\tau}} = 10\log(2) = 3dB ∣ G ( jω ) ∣ d B ω = τ 1 = 10 log ( 2 ) = 3 d B la fase resulta ser:
∠ G ( j ω ) = arctan ( − ω τ ) = { → 0 cuando ω → 0 → − π 2 cuando ω → ∞ = − π 4 con ω = 1 τ \angle{G(j\omega)} = \arctan(-\omega\tau)= \left\{
\begin{array}{l}
\rightarrow 0 \text{ cuando } \omega\rightarrow0\\
\rightarrow -\dfrac{\pi}{2} \text{ cuando } \omega\rightarrow\infty\\
=-\dfrac{\pi}{4}\text{ con }\omega=\dfrac{1}{\tau}
\end{array}\right. ∠ G ( jω ) = arctan ( − ω τ ) = ⎩ ⎨ ⎧ → 0 cuando ω → 0 → − 2 π cuando ω → ∞ = − 4 π con ω = τ 1 Bode de G ( s ) = 1 − τ s G(s)={1-\tau s} G ( s ) = 1 − τ s τ = 1 \tau=1 τ = 1
Pasos para dibujar un diagrama de Bode ¶ Manipular la función de transferencia G ( s ) G(s) G ( s )
G ( s ) = k 0 ∏ j = 1 m ( τ j s + 1 ) ∏ i = 1 n ( τ i s + 1 ) G(s)= k_0 \dfrac{\prod_{j=1}^{m}(\tau_{j}s+1)}{\prod_{i=1}^{n}(\tau_{i}s+1)} G ( s ) = k 0 ∏ i = 1 n ( τ i s + 1 ) ∏ j = 1 m ( τ j s + 1 ) Magnitud: Determinar las singularidades en el origen ⟹ k 0 ( j ω ) n \Longrightarrow k_0(j\omega)^n ⟹ k 0 ( jω ) n n x 20 d B / d e c n~x~20dB/dec n x 20 d B / d ec k 0 k_0 k 0 ω = 1 \omega = 1 ω = 1
Completar la magnitud extender las asintotas para bajas frecuencias hasta el primer punto de quiebre ⟹ \Longrightarrow ⟹
Dibujar el módulo aproximado sabiendo que los polos/ceros en el punto de quiebre, modifican en -3dB/3dB respectivamente y para los polos/ceros de segundo orden ⟹ ∣ G ( j ω ) ∣ d B ≈ 1 2 ξ \Longrightarrow |G(j\omega)|_{dB} \approx \dfrac{1}{2}\xi ⟹ ∣ G ( jω ) ∣ d B ≈ 2 1 ξ
Graficar asintotas en baja frecuencia como ϕ = n 90 º \phi = n~90º ϕ = n 90º
Aproximar como guía con saltos de ± 90 º \pm 90º ± 90º ± 180 º \pm 180º ± 180º
Aproximar con una asintota el salto según corresponda
Se puede aproximar por una curva suave en forma aproximada.
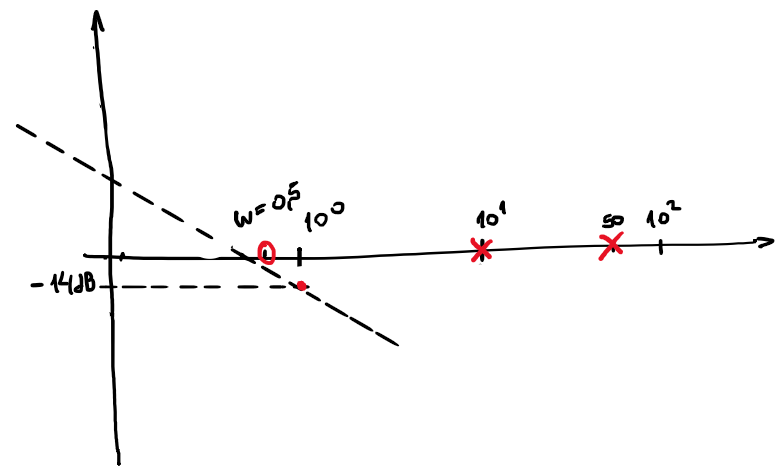
Ejemplo: Primer Bode asintótico ¶ Seguimos los pasos anteriores para dibujar un Bode asintótico
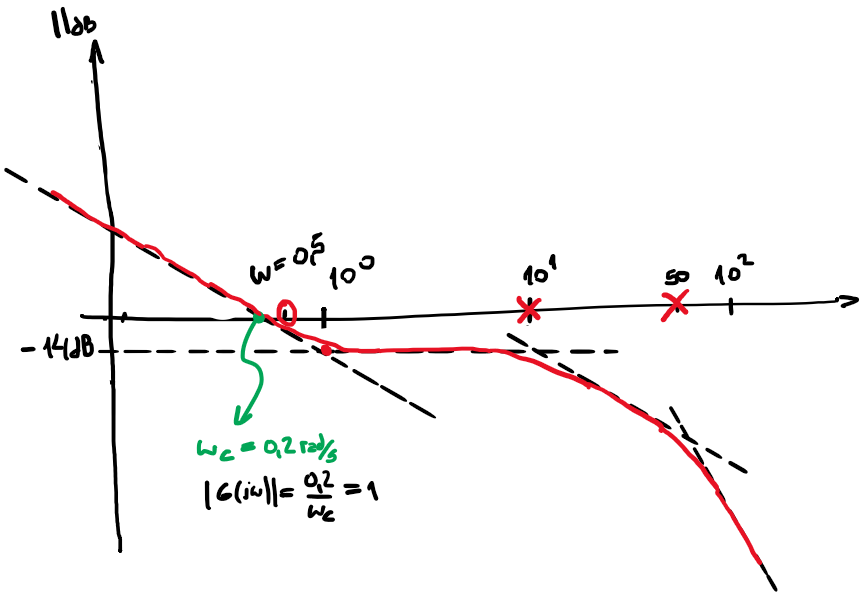
G ( s ) = 200 ( s + 0.5 ) s ( s + 10 ) ( s + 50 ) G(s) = \dfrac{200(s+0.5)}{s(s+10)(s+50)} G ( s ) = s ( s + 10 ) ( s + 50 ) 200 ( s + 0.5 ) step) reescribir la FT de la forma:
H ( ω ) = G ( j ω ) = 0.2 ( j ω 0.5 + 1 ) j ω ( 0.1 j ω + 1 ) ( j ω 50 + 1 ) H(\omega)=G(j\omega) = \dfrac{0.2(\dfrac{j\omega}{0.5}+1)}{j\omega~\big(0.1j\omega+1\big)\big(\dfrac{j\omega}{50}+1\big)} H ( ω ) = G ( jω ) = jω ( 0.1 jω + 1 ) ( 50 jω + 1 ) 0.2 ( 0.5 jω + 1 ) step) para bajas frecuencias tenemos que:
G ( j ω ) ≃ 0.2 j ω − 20 d B / d e c para ω ⟶ 0 \begin{align*}
G(j\omega) \simeq \dfrac{0.2}{j\omega} & -20dB/dec & \text{ para } & \omega \longrightarrow 0
\end{align*} G ( jω ) ≃ jω 0.2 − 20 d B / d ec para ω ⟶ 0 para ω = 1 ⟹ k 0 = 0.2 ⟹ ≈ − 14 d B \omega = 1 \Longrightarrow k_0=0.2 \Longrightarrow \approx -14dB ω = 1 ⟹ k 0 = 0.2 ⟹≈ − 14 d B
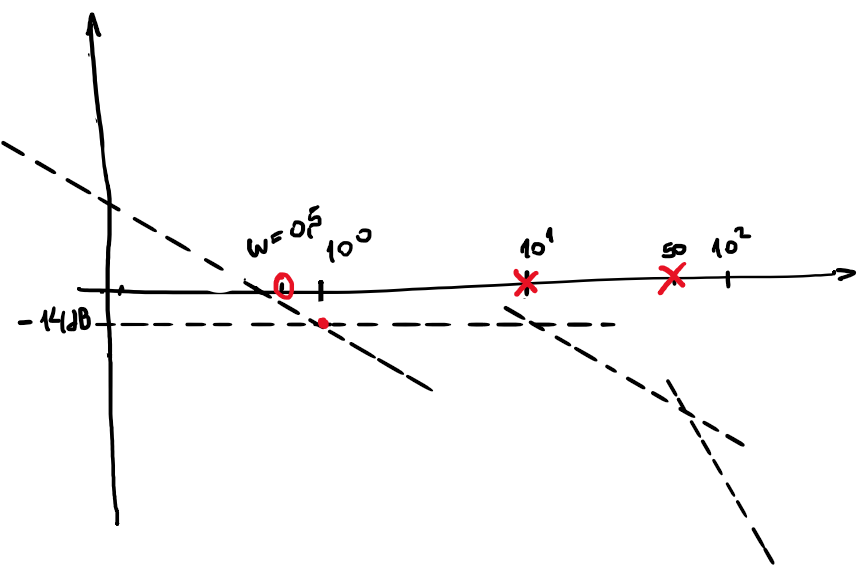
step) Dibujar las asíntotas
puntos de quiebres ω = { 0.5 (un cero) la pendiente pasa a 0 d B / d e c ≃ − 8 d B 10 (un polo) la pendiente pasa a − 20 d B / d e c 50 (un polo) la pendiente pasa a − 40 d B / d e c \text{puntos de quiebres } \omega = \left\{
\begin{array}{l}
0.5 \text{ (un cero) la pendiente pasa a } 0dB/dec \simeq -8dB\\
10 \text{ (un polo) la pendiente pasa a } -20dB/dec \\
50 \text{ (un polo) la pendiente pasa a } -40dB/dec \\
\end{array}\right. puntos de quiebres ω = ⎩ ⎨ ⎧ 0.5 (un cero) la pendiente pasa a 0 d B / d ec ≃ − 8 d B 10 (un polo) la pendiente pasa a − 20 d B / d ec 50 (un polo) la pendiente pasa a − 40 d B / d ec step) corrección del módulo en los puntos de quiebre
puntos de quiebres ∣ ∣ d B = { + 3 d B para ω = 0.5 − 3 d B para ω = 10 − 3 d B para ω = 50 \text{puntos de quiebres } ||_{dB} = \left\{
\begin{array}{l}
+3dB \text{ para } \omega = 0.5\\
-3dB \text{ para } \omega = 10\\
-3dB \text{ para } \omega = 50\\
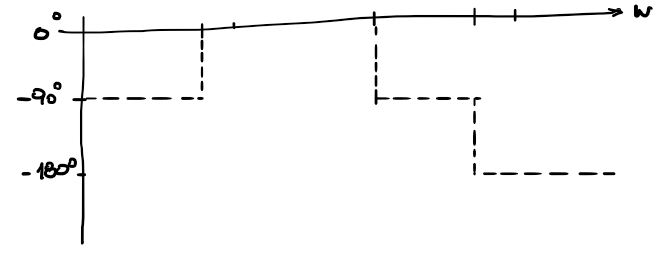
\end{array}\right. puntos de quiebres ∣ ∣ d B = ⎩ ⎨ ⎧ + 3 d B para ω = 0.5 − 3 d B para ω = 10 − 3 d B para ω = 50 step) Fase a baja frecuencia el − 90 º -90º − 90º
step) Graficar escalones en puntos de equilibrio
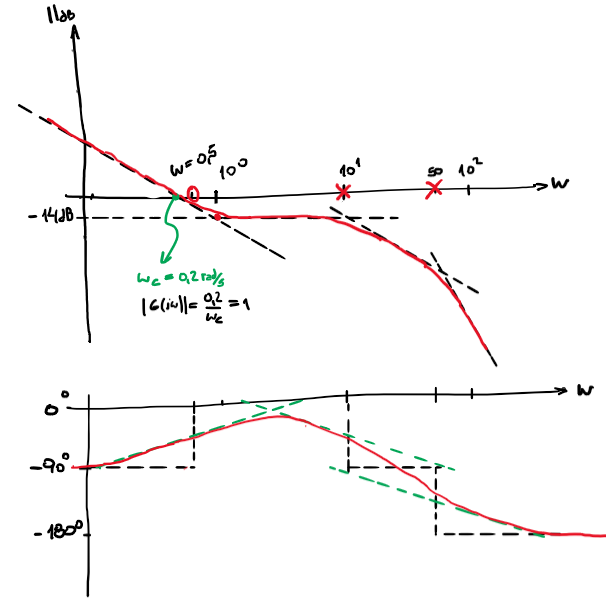
step) dibujar asíntotas, en verde la asintotas con una recta en +/- media decada.
Bode asintótico
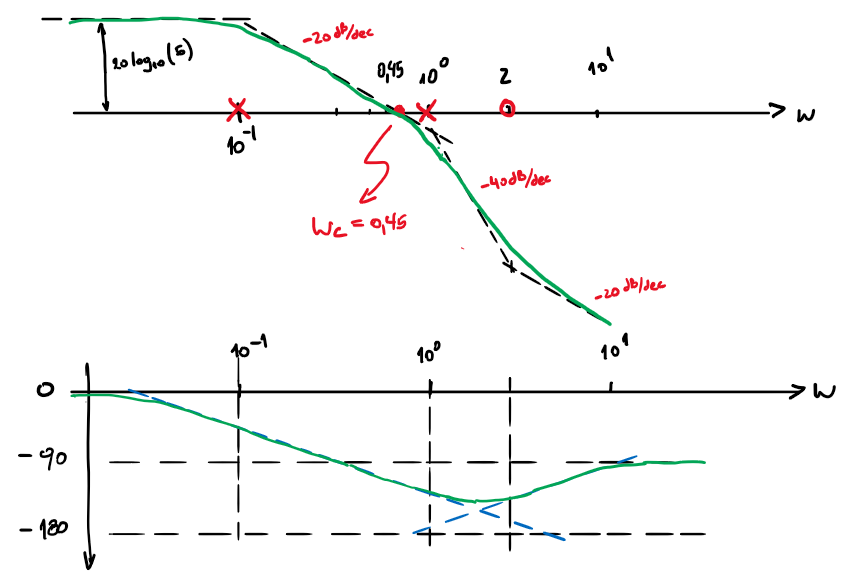
Ejemplo: ¶ Graficaremos el Bode asintótico de la siguiente función de transferencia
G ( s ) = 5 1 2 s + 1 ( s + 1 ) ( 10 s + 1 ) G(s)=5\dfrac{\dfrac{1}{2}s+1}{(s+1)(10s+1)} G ( s ) = 5 ( s + 1 ) ( 10 s + 1 ) 2 1 s + 1 La frecuencia de corte por 0dB se calcula
∣ G ( j ω ) ∣ ω = ω c = 5 ∣ 1 2 j ω + 1 ∣ ∣ j ω + 1 ∣ ∣ 10 j ω + 1 ∣ = 1 ⏟ ω c = 0.456 r a d / s \underbrace{|G(j\omega)|_{\omega=\omega_c}=5\dfrac{|\dfrac{1}{2}j\omega+1|}{|j\omega+1||10j\omega+1|}=1}_{\omega_c = 0.456 rad/s} ω c = 0.456 r a d / s ∣ G ( jω ) ∣ ω = ω c = 5 ∣ jω + 1∣∣10 jω + 1∣ ∣ 2 1 jω + 1∣ = 1 Bode asintótico de G ( s ) G(s) G ( s )