Sistemas¶
Esta definición de sistemas es en general muy genérica y no está necesariamente restringidos a sistemas físicos. Pueden ser biológicos, económicos, computacionales, informáticos, sociales, etc.
Ejemplos de sistema¶
Ecosistema¶
Ambiente aislado compuesto por dos clases de individuos: presas (P: población de presas) y depredadores (D: población de depredadores).
Hipótesis del modelo:
En ausencia de depredadores (), la población de presas crece exponencialmente.
Los depredadores sólo se alimentan de presas, por lo que en ausencia de presas (), la población de depredadores se extingue exponencialmente.
Un posible modelo que verifica estas hipótesis es el de Lotka-Volterra
Exiten numerosas herramientas para resolver este numéricamente este tipo de problema, conocido como problema de valores iniciales. En particular con Python lo podemos resover utilizando el módulo integrate del paquete scipy, que contiene la función solve_ivp.
from scipy.integrate import solve_ivpEjercicios:¶
En esta representación del sistema, ¿cuáles les parece podrían que podrían ser las entradas y las salidas?
Utilizando Python, resolver para el módelo anterior con las siguientes condiciones:
Modelo para zorros y conejos: .
Escribir las ecuaciones que gobiernan el movimiento de una masa sujeta de un resorte de fuerza , y que se le aplica una entrada fuerza y el rozamiento produce una fuerza .
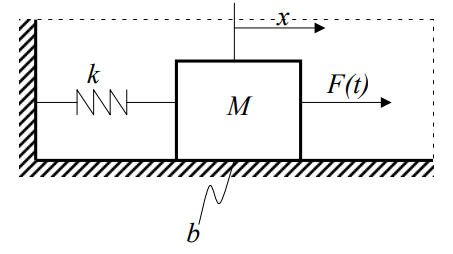
Figure 1:Sistema masa-resorte
Expresarlas como un sistema de ecuaciones diferenciales de primer orden que solo dependen de variables del sistema sin derivar, es decir:
donde:
Caracterización de sistemas¶
Linealidad¶
Un sistema es lineal si verifica el Principio de Superposición, tanto para entradas como para condiciones iniciales.
Si para una entrada aplicada en el instante , con el sistema en un estado inicial , la salida es , y para una entrada aplicada en el instante , con el sistema en un estado inicial , la salida es entonces si se aplica una entrada en el instante , con el sistema en un estado inicial , la salida será
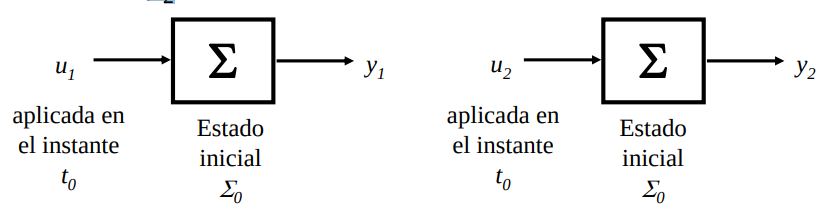
Figure 1:Hipótesis linealidad
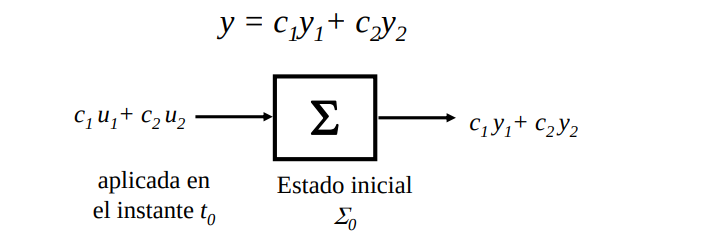
Figure 3:Requerimiento de linealidad
Es claro que esta propiedad, como fue definida, es imposible de verificar en la práctica, ya que no se pueden realizar los ensayos propuestos en el mismo período de tiempo.
Debemos asumir entonces que el sistema no cambia con el tiempo (propiedad de estacionariedad o invariancia en el tiempo, que definiremos a continuación), de manera que podemos realizar los ensayos a distintos tiempos a partir del sistema en el mismo estado inicial.
Un sistema que no verifica el principio de Superposición se denomina no lineal.
Invariancia en el tiempo¶
Un sistema es invariante en el tiempo si su salida es siempre la misma cada vez que se aplique la misma entrada (para las mismas condiciones iniciales), sin importar el instante en que se aplique la entrada. Para dar una definición más precisa, es necesario definir el operador desplazamiento temporal que notaremos: que aplicado a una función del tiempo, la desplaza temporalmente un intervalo , es decir:
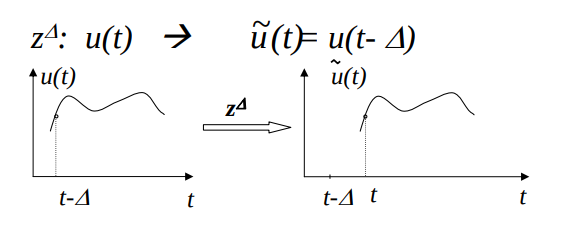
Figure 4:Operador desplazamiento temporal
Por lo tanto, el sistema es estacionario estacionario si para una entrada aplicada en el instante resulta la salida es entonces para una entrada = aplicada en la salida es
Principio de estacionariedad o invariancia en el tiempo¶
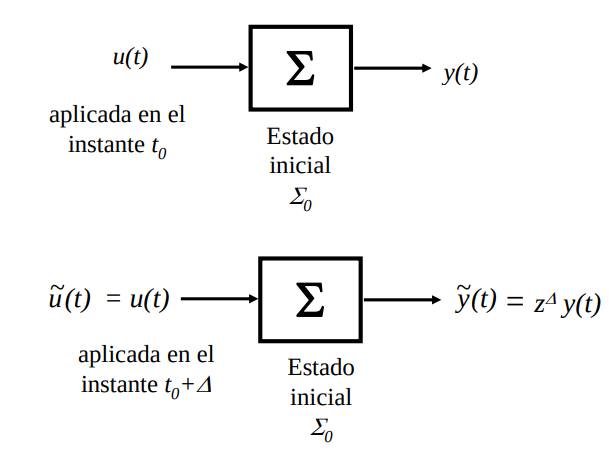
Figure 5:Principio de invariancia en el tiempo
Sistemas Estáticos y Dinámicos¶
Un sistema en el cual la salida en el instante depende exclusivamente de la entrada en ese instante es llamado Sistema Estático o sin memoria. En contraposición, un Sistema Dinámico es uno en el cual la salida en el instante depende también de valores pasados y/o futuros de la entrada, además del valor en .
Los sistemas que estudiaremos en esta materia son los sistemas dinámicos, es decir que el valor de la salida actual depende no solo de las entradas actuales sino también de los valores de la entradas pasadas. Aunque diseñaremos también algunos controladores que pueden considerarse estáticos, es decir que cuya salida solo depende de valores presentes de la entrada del controlador.
Sistemas Causales y No causales¶
Un sistema es causal si su respuesta a una entrada no depende de valores futuros de esa entrada y/o valores futuros de salidas. Un sistema que no verifica esta propiedad es llamado no causal. En particular un sistema se dice anticausal si su respuesta a una entrada depende exclusivamente de valores futuros de esa entrada y/o valores futuros de salidas.
Todos los sistemas físicos son causales.
Ejercicio clasificación de sistemas¶
Clasificar los siguientes sistemas si son:
lineales/no lineales
dinámicos/estáticos
variantes/invariantes
Sistema amplificador de audio idealizado 1:
donde es la señal de potencia de salida y es la señal de entrada
Es un sistema idéntico al sistema 2, pero se tiene en cuenta una degradación de la ganancia debido al calentamiento al pasar el tiempo, que se modela de la siguiente manera:
Sistema masa resorte 1
donde es una fuerza aplicada que se puede manipular (es la entrada del sistema). La salida del sistema será la posición .
Sistema masa resorte 2
donde es una fuerza aplicada que se puede manipular (es la entrada del sistema). La salida del sistema será la posición .
Representación matemática de los sistemas dinámicos¶
De los ejercicios anteriores podemos notar que los sistemas dinámicos son representados por ecuaciones diferenciales. En general, si la ecuación diferencial es lineal la podemos escribir como;
Si recordamos las clases de matemáticas, la resolución de estas ecuaciones se plantean dividiendo el problema en dos:
solución de la ecuación homogénea, es decir con
solución de la ecuación particular, que depende de la forma de
Cuando la ecuación diferencial es la representación matemática de un sistema, se dice que la solución de la ecuación homogénea es la respuesta libre del sistema, ya que describe el comportamiento del sistema cuando no es afectado por ninguna entrada exógena; y esta solución depende solo de los valores de la condiciones iniciales del mismo, mientas que la solución de la ecuación particular es la respuesta forzada del sistema ya que se debe a la entrada del sistema.
Solución de la ecuación homogénea¶
De la ecuación anterior obtenemos el polinomio característico del sistema y lo igualamos a cero:
Si las raíces del polinomio anterior son , entonces la solución de la homogénea es:
Podemos ver que la distintos casos de las raíces de :
raíces reales positivas: en ese caso la solución de la homogénea tenderá a diverger, ya que poseerá términos que tienden a infinito y en este caso de que aparezca alguna raíz de esta forma se dice que el sistema es inestable
raíces reales negativas: en ese caso la solución de la homogénea en infinito tienda a cero
raíces complejas en caso de que el polinomio sea a coeficientes las raíce complejas siempre aparecen con su conjugado, y por lo tanto la solución de esos pares se puede escribir como:
Donde y son la parte real e imaginaria respectivamente del par ceros complejo conjugado de la ecuación caraterística, y y salen la resolución de la ecuación de euler para senos y cosenos.
Nuevamente acá vemos que si es positivo la solución va a diverger y si es negativo la solución va a converger. Finalmente en el caso de la solución es una señal armónica pura.
Solución particular¶
Para obtener la solución particular dependemos de la forma de la , y se plantea que la solución particular tiene la misma forma. En general nos interesan 3 formas de :
En caso de que sea una función no senoidal periódicas, las podemos descomponer según serie de Fourier y, aplicando linealidad, obtener la solución de la ecuación particular por superposición.
Conclusión¶
Podemos notar que la respuesta del sistema siempre es una suma de funciones exponenciales y senoidales de distintas frecuencias:
algunas frecuencias serán dependientes del sistema (solución homogénea)
algunas frecuencias serán dependientes de la entrada (solución particular)
La principal herramienta para estudiar la composición armónica de una función no necesariamente periódica es la transformada de Fourier. Como las soluciones (respuesta) de nuestras ecuaciones (sistemas) son fundamentalmente funciones (señales) armónicas, es fácil entender la importancia del la transformada de Fourier.
La desventaja de esta transformada es que “no captura” la información respecto a los transitorios, es decir respecto a las exponenciales. matemáticamente la solución a este problema se obtiene mediante la transformada de Laplace. Sin embargo, la gran ventaja de la transformada de Fourier de un sistema es que puede ser aproximada fácilmente a partir de muestras de la señal usando el algoritmo fft, mientras que la transformada de Laplace no tiene forma de obtenerse numéricamente a partir de muestras de la señal.