import control as ctrl
import numpy as np
import matplotlib.pyplot as plt
Problema de levitador magnético#
Definimos el sistema en estudio
G=ctrl.tf(-40,[1,20,-100,-2000])
G
G.pole()
array([ 10.+0.j, -20.+0.j, -10.+0.j])
s=ctrl.tf('s')
Otra forma de definirlo:
Gs=-40/((s+20)*(s**2-100))
Gs
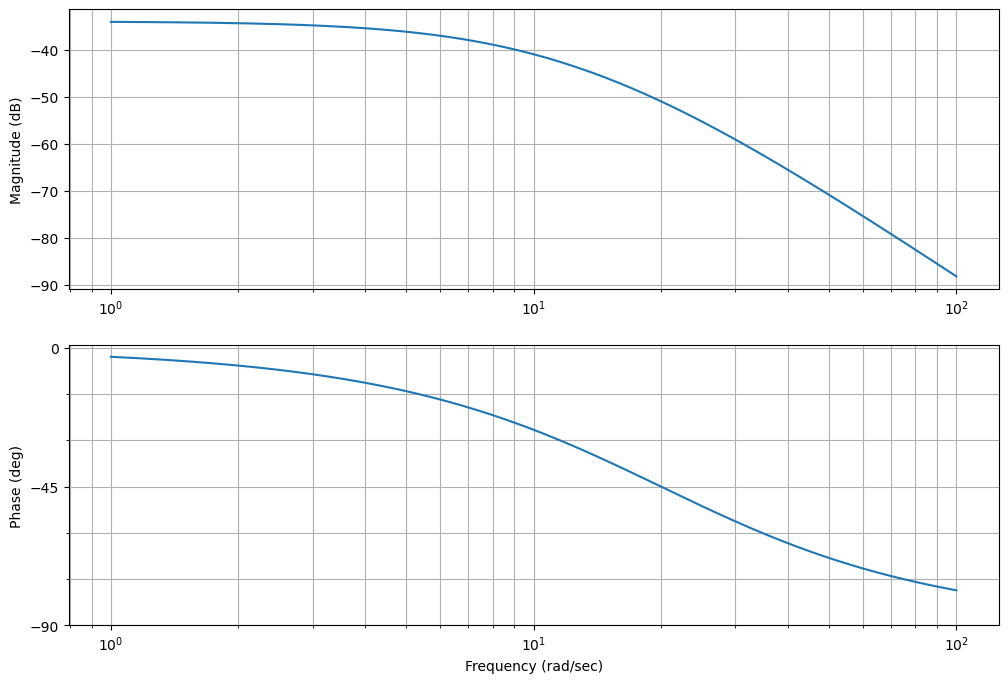
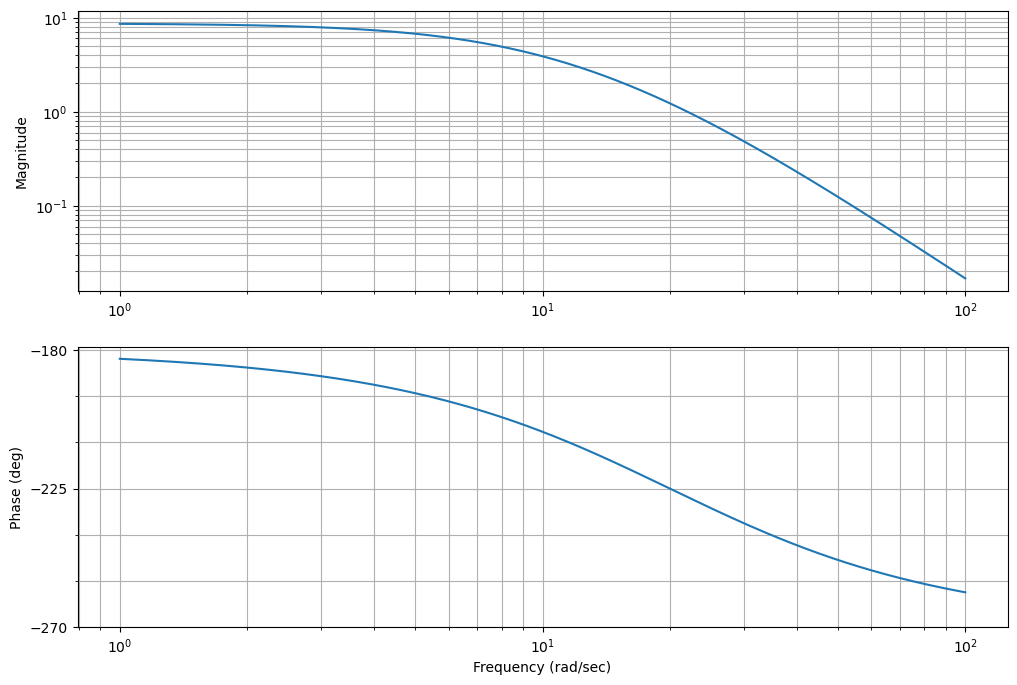
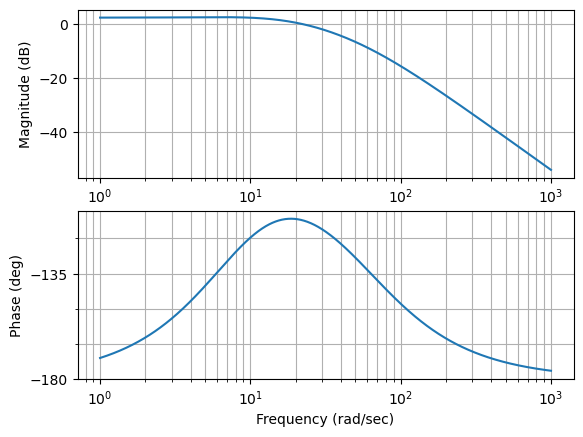
Lo analizamos con el bode
ctrl.bode(Gs, dB=True)
plt.gcf().set_size_inches(12,8)
zeta=0.46
sv=np.exp(-np.pi*zeta/(np.sqrt(1-zeta**2)))
sv
0.19641014802711199
Obtenermos el \(\omega_n\)
wn=4/0.4/0.46
wn
21.73913043478261
Del resutlado anterior defino \(\omega_c=22\), calculo la ganancia necesaria para obtener esa frecuencia de corte
wc=22
k1=1/np.abs(G(wc*1j))
k1
434.08920742170034
ctrl.stability_margins(G*k1)
(inf, 132.27368900609372, inf, nan, 22.0, nan)
T=ctrl.feedback(k1*G)
T.pole()
array([-21.27108628+20.16268541j, -21.27108628-20.16268541j,
22.54217255 +0.j ])
Vemos que hicimos un controlador inestable. Vamos a estudiar la estabildad con Nyquist (en la pizarra). Luego verificamos con el Nyquist.
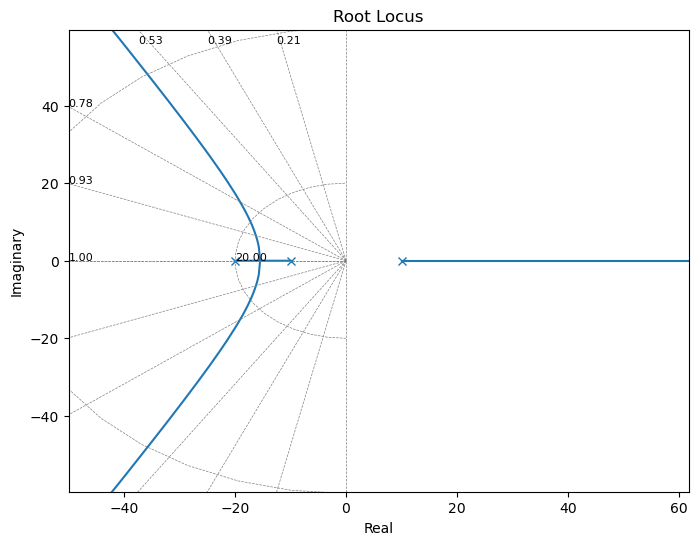
ctrl.rlocus(-G);
plt.gcf().set_size_inches(8,6)
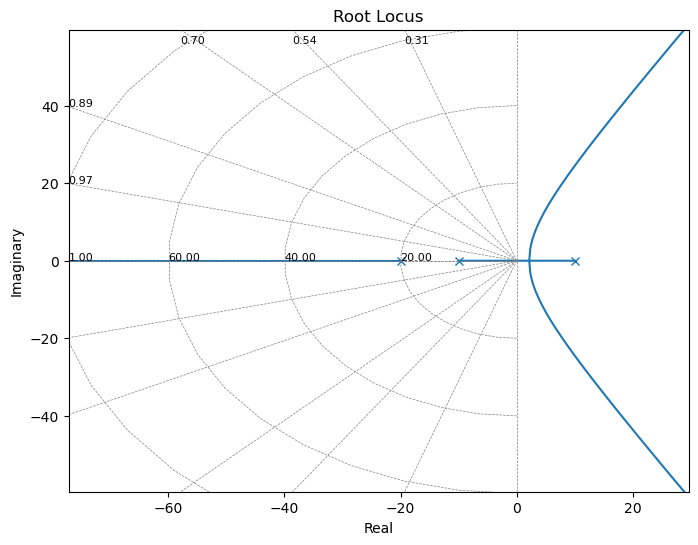
ctrl.rlocus(G);
plt.gcf().set_size_inches(8,6)
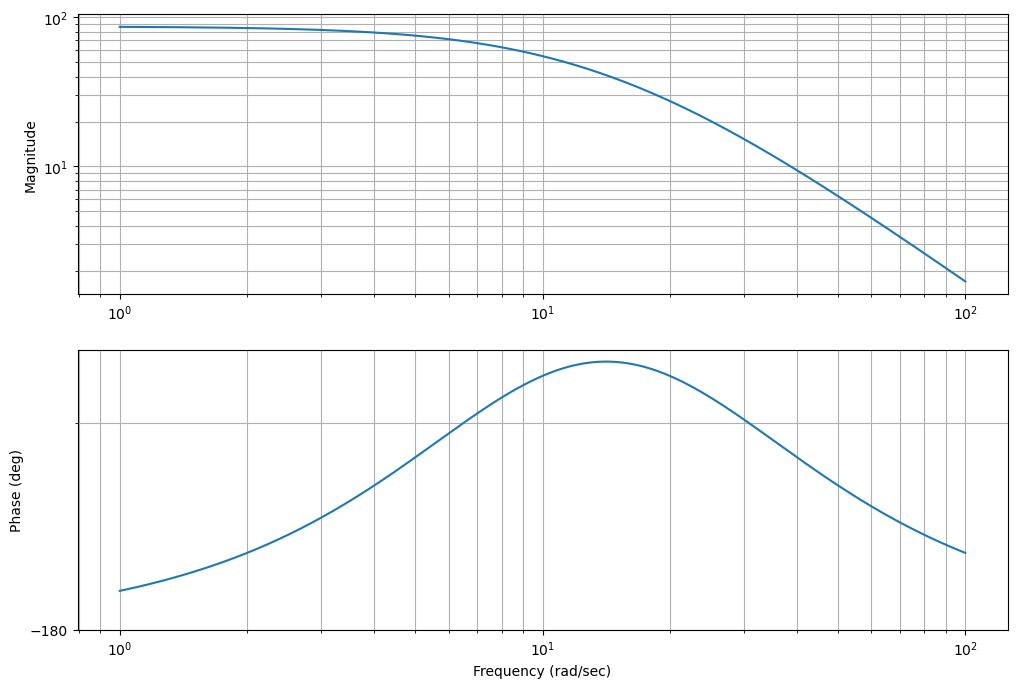
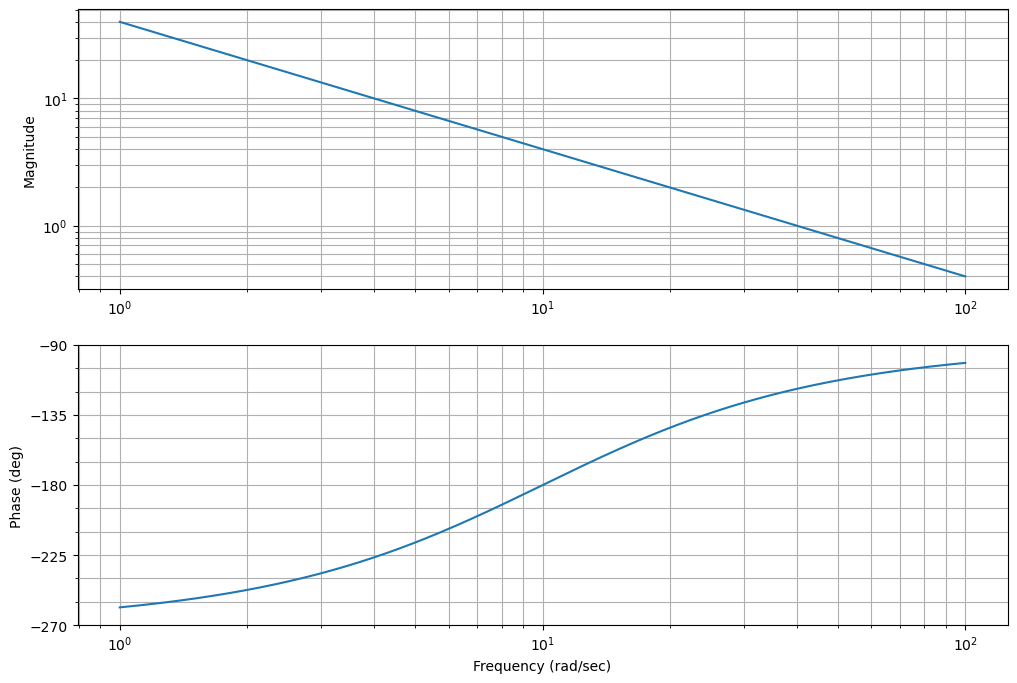
Vemos que pasa en la frecuencia de cruce que necesitamos
ctrl.bode(-k1*G);
plt.gcf().set_size_inches(12,8)
ctrl.stability_margins(-k1*G)
(0.11518369760210831,
-47.72631099390625,
0.7892414128612042,
0.0,
22.0,
24.28778602304735)
Podemos ver que el sistema neceista más de 90 grados lo cual es imposible de conseguir con un solo cero. Vamos a tener que agregar un cero y un lead como mínimo.
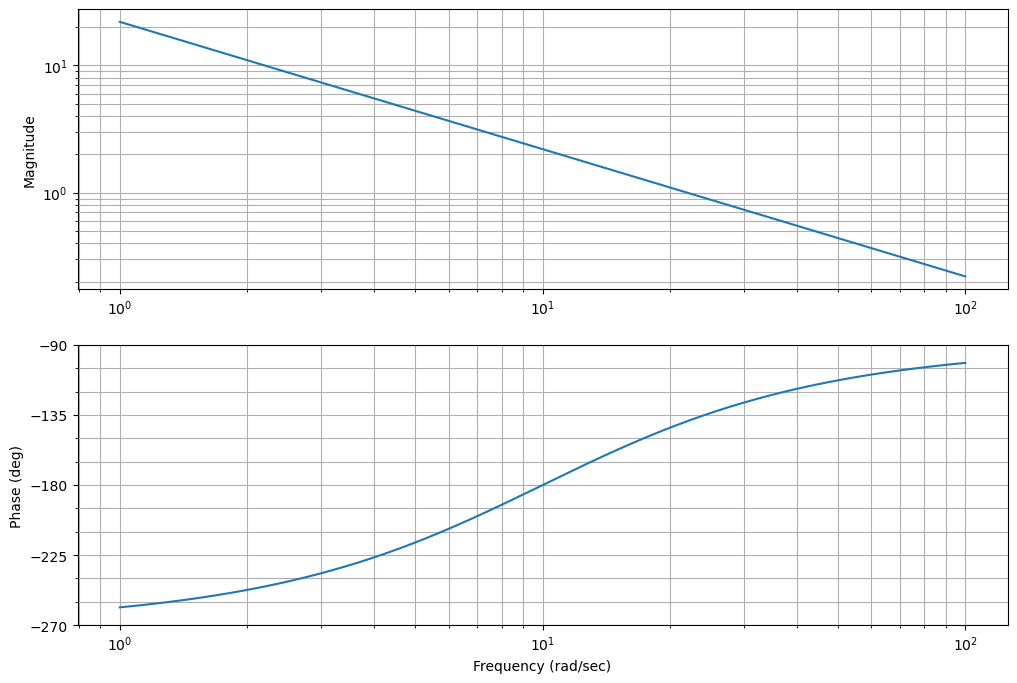
Vamos a tratar de agregar un cero, en algún lugar que no molesta al transitorio pero que agrega fase. Este lugar podria ser -10, tapando el polo real negativo de la planta.
d1=(s+10)
ctrl.bode(-k1*G*d1);
plt.gcf().set_size_inches(12,8)
phi_max=50*np.pi/180
alpha = (1-np.sin(phi_max))/(1+np.sin(phi_max))
alpha
0.13247433143179424
wmax=22
TD=1/(wmax*np.sqrt(alpha))
z=-1/TD
p=-1/(alpha*TD)
z, p
(-8.007345153856452, -60.444503228001686)
d2=(-s/z+1)/(-s/p+1)
d2
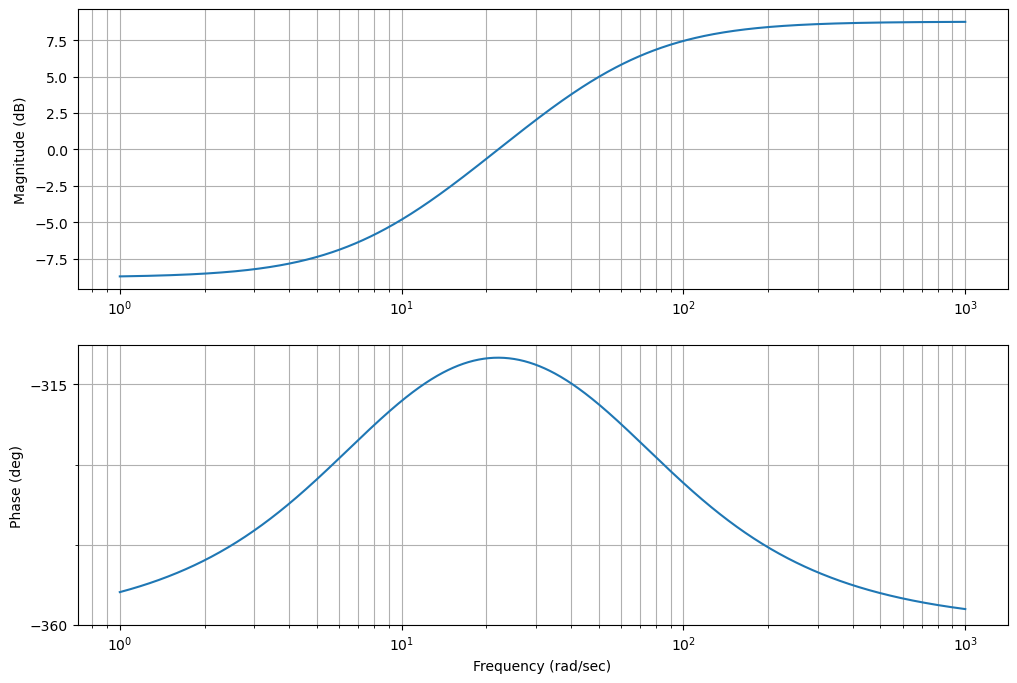
kd2=1/np.abs(d2(wc*1j))
ctrl.bode(d2*kd2, dB=True);
plt.gcf().set_size_inches(12,8)
C1=d1*d2*kd2
ctrl.bode(-G*d1*d2*kd2, dB=True);
fig=plt.gcf()
fig.set_size_inches(12,8)
k3=1/np.abs((-G*d1*d2*kd2)(22j))
k3
17.96273921204669
T=ctrl.feedback(-G*d1*d2*kd2*k3)
T.pole()
array([-34.40165524+32.89590354j, -34.40165524-32.89590354j,
-10. +0.j , -1.64119275 +0.j ])
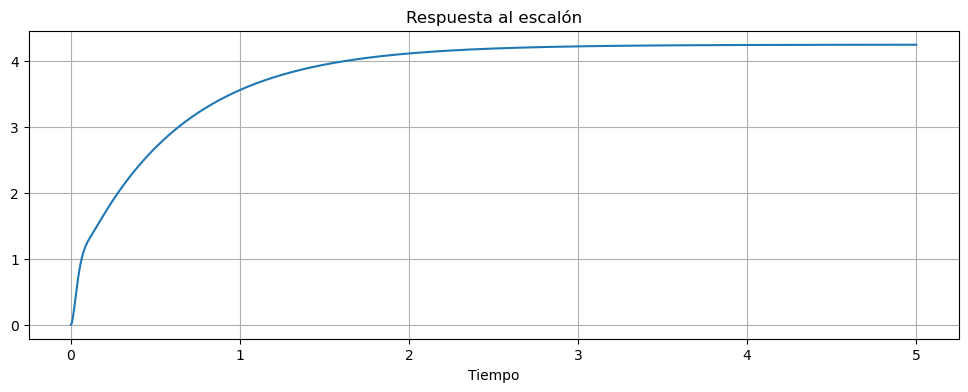
Vemos que este diseno no resultó del todo correcto. Este se debe a varias razones:
poca ganancia en estado estacionario
un polo negativo chico que resulta dominante frente a los que diseñamos
t,y=ctrl.step_response(T, T=np.linspace(0,5,2000))
fig, ax = plt.subplots(figsize=(12, 4))
ax.plot(t,y)
ax.set_title('Respuesta al escalón')
ax.set_xlabel('Tiempo')
ax.grid()
L=-G*d1*d2*kd2*k3
ctrl.bode(L, dB=True);
fig=plt.gcf()
fig.set_size_inches(12,8)
<Figure size 1200x800 with 0 Axes>
G
G.pole()
array([ 10.+0.j, -20.+0.j, -10.+0.j])
Para lograr un controlador que en principio funcione y epnsar de otra manera los lead-lag podemos hacer loop-shaping, y después ajusta a nuestro a lo que necesitemos.
Cls=((s+10)*(s+10)*(s+20))/s
ctrl.bode(-G*Cls);
fig=plt.gcf()
fig.set_size_inches(12,8)
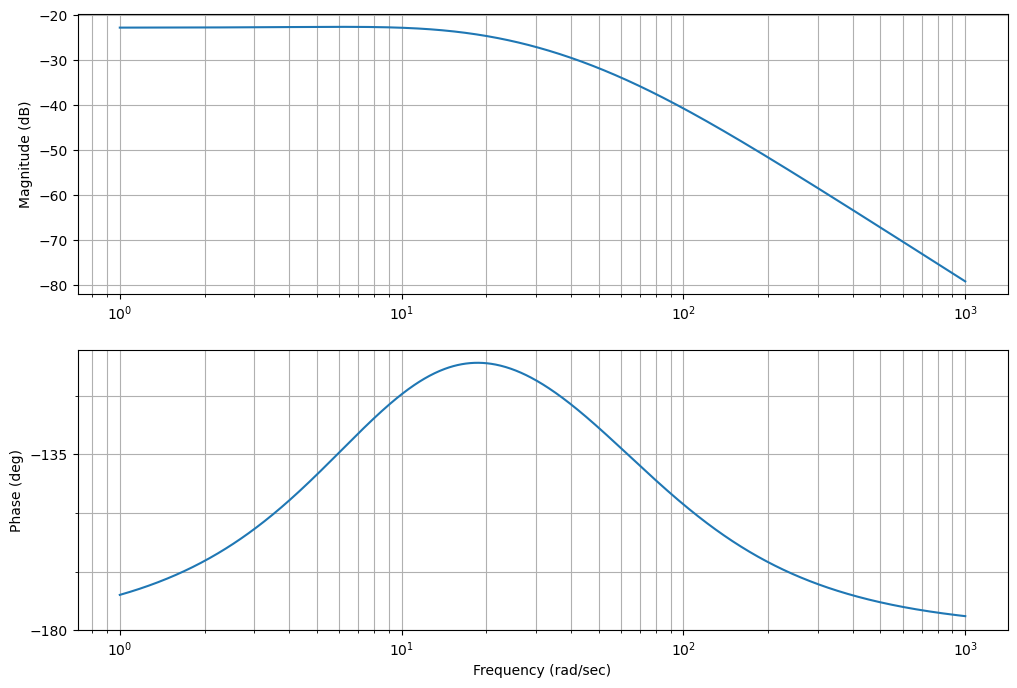
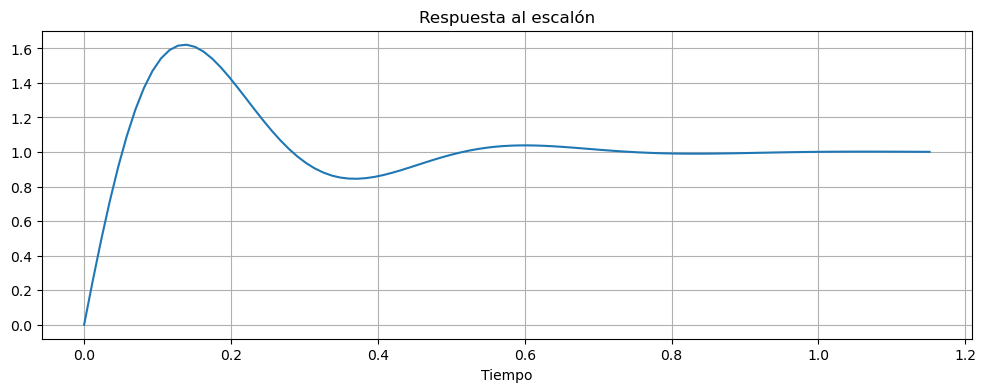
Analizamos que margen de fase tenemos a 22 rad y luego vemos la respuesta. Podemos después redisenar y mejorar aumentando la frecuencia de corte. Recordar que los isstemas inestables son más faciles de controlar más rápido que lento
kls=1/np.abs((G*Cls)(wc*1j))
ctrl.bode(-G*Cls*kls);
fig=plt.gcf()
fig.set_size_inches(12,8)
ctrl.stability_margins(-G*Cls*kls)
(0.4545454545454543,
41.112090439166934,
0.6422688979612565,
9.999999999999996,
22.000000000000004,
16.941860377377967)
T=ctrl.feedback(-G*Cls*kls)
t,y=ctrl.step_response(T)
fig, ax = plt.subplots(figsize=(12, 4))
ax.plot(t,y)
ax.set_title('Respuesta al escalón')
ax.set_xlabel('Tiempo')
ax.grid()
Cls
Cls2=Cls*1/(s/400+1)**2
Cls2
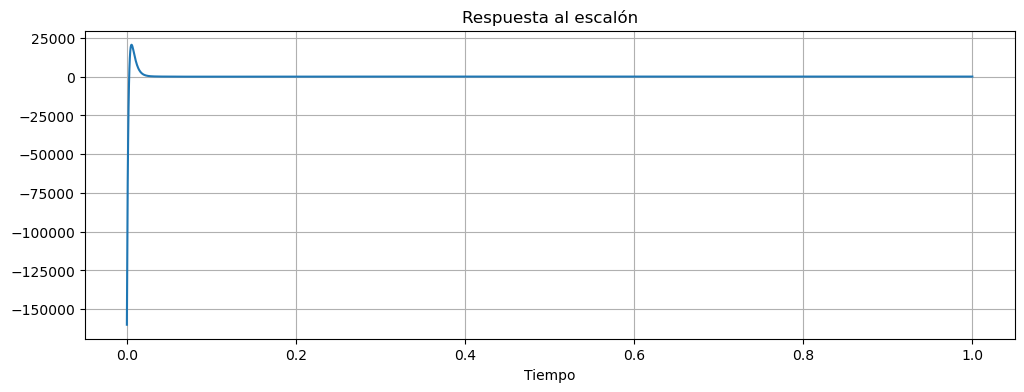
Tu=ctrl.feedback(-Cls2,G)
t,y=ctrl.step_response(Tu, T=np.linspace(0,1,2000))
fig, ax = plt.subplots(figsize=(12, 4))
ax.plot(t,y)
ax.set_title('Respuesta al escalón')
ax.set_xlabel('Tiempo')
ax.grid()