
Respuesta Frecuencial de Sistemas lineales y SISO#
Formalismos matemáticos#
Teorema#
Dado \(\Sigma = (N,D)\) un sistema SISO y con \(\omega>0\). Si \(T_{N,D}\) no tiene polos en el eje imaginario, entonces dado \(u(t)=u_0 \sin(\omega t)\). hay un única salida periódica \(y_p(t)\) con periodo \(T=\dfrac{2\pi}{\omega}\) que es solución del sistema tal que:
como entrada una sinusoide \(\Longrightarrow\) salida senoide desfasado \(\therefore\) si \((N,D)\) es un sistema SISO y lineal de la forma input/output (Esto significa que no importan los estados, solo se busca una \(u(t)\) que haga satisfacer el \(y(t)\)) se define la respuesta frecuencial por \(H_{N,D}(\omega)= T_{N,D}(i\omega)\) es decir haciendo \(s=i\omega\).
También existe una correspondencia entre la respuesta frecuencial y la respuesta impulsiva.
Proposición#
Sea \((N,D)\) sea un sistema estrictamente propio, SISO y lineal, de la forma input/output y supongamos que los polos de \(T_{N,D}\) están en el semiplano negativo. Entonces \(H_{N,D}(\omega) = \check{h}_{N,D}(\omega)\) la transformada de Fourier.
Demo#
tenemos que \(H_{N,D}(\omega)= T_{N,D}(i\omega)\) y entonces:
esto es la transformada de Laplace en \(s=i\omega\)
asumiendo todos los polos en el semiplano izquierdo \(\mathbb{C}^-\) tenemos que la integral existe, si ademas, consideramos \(\underbrace{h_{N,D}(t)=0\text{ para }t<0}_{causal}\) tenemos que:
Proposición#
Dado \((N,D)\) un sistema estrictamente propio, SISO y lineal, de la forma input/output y suponiendo que los polos de \(T_{N,D}\) están en el semiplano izquierdo, tenemos que:
esta es la forma de ir al dominio de Laplace desde el dominio frecuencial, es posible demostrar la preposición anterior aplicando la transformada de Fourier inversa.
Resultado importante es la correspondencia entre los tres dominios, con esto se establece una relación entre el dominio temporal, el plano-s o de Laplace y el dominio frecuencial, como se muestra en la figura siguiente:
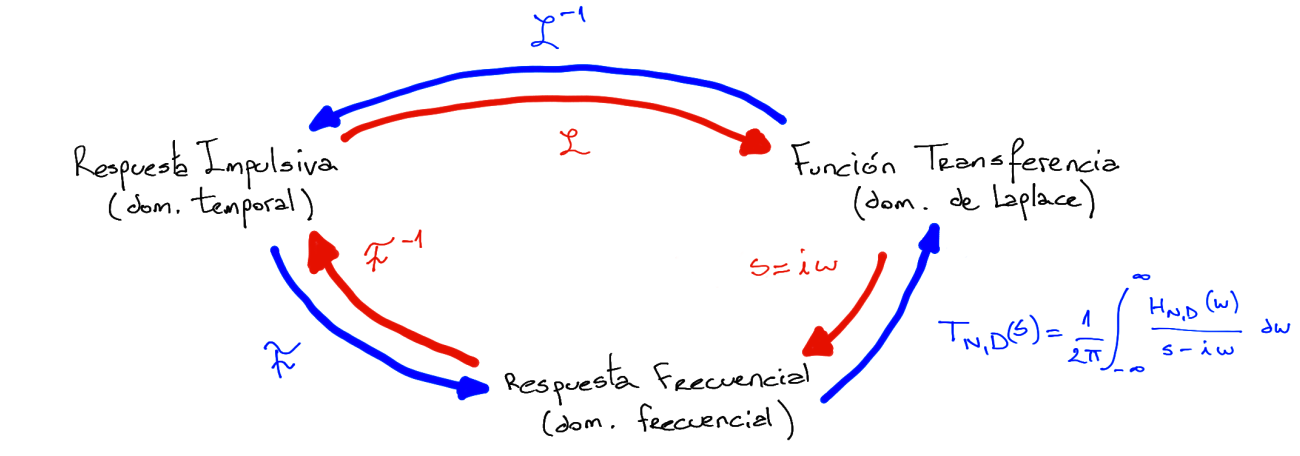
Figura 53 Relaciones entre dominios temporal, Laplace y frecuencial#
Análisis del paso de \(s\rightarrow \omega\)#
Seguimos analizando del paso de del dominio de Laplace al frecuencial, para esto consideraremos el sistema lineal e invariante en el tiempo descripto por la función de transferencia:
que por simplicidad consideraremos que \(p_i\) y \(z_j\) son reales simples.
Nos interesa determinar la respuesta del sistema a una entrada de la forma (sinusoidal)
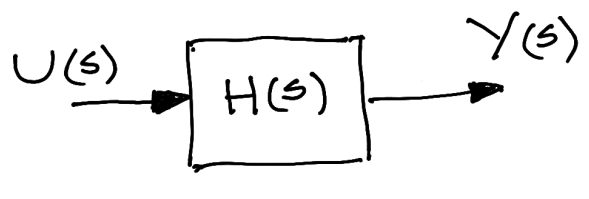
Figura 54 Sistema \(H(s)\)#
asumiendo condiciones iniciales nulas
expandiendo en fracciones parciales, se tiene
donde el calculo de los residuos da:
de \((1)\) tenemos que:
escribiendo
con \(\phi (\omega)=\angle{H(j\omega)}\)
por lo que:
tomando la transformada inversa de \(Y(s)\) se obtiene
Lo anterior se puede escribir como:
asumiendo que el sistema es BIBO estable, entonces
y el término de la respuesta transitoria
Es decir, cuando \(t\longrightarrow \infty\) el sistema alcanza un régimen permanente senoidal (RPS) de la forma
Notar que:
La salida es una senoide de la misma frecuencia que la senoide de la entrada, amplificada o atenuada por \(|H(j\omega)|\) y desfasada por el ángulo \(\angle{H(j\omega)}\)
al término
se lo llama Transferencia Armónica o respuesta en Frecuencia del sistema. Su conocimiento para todo \(\omega\) permite determinar la respuesta en régimen permanente a entradas sinusoidales
Los resultados se pueden extender al caso de tener polos complejos conjugados y con multiplicidad. Siempre con la condición que sean estables, es decir \(\mathbb{Re}(p_i)<0\)
Diagrama de Bode#
Lo que se hace normalmente es graficar la respuesta frecuencial del sistema. Para esto se usa que:
\(|H(\omega)|\) es el módulo de \(H(\omega)\) y \(\angle{H(\omega)}\) es el argumento.
Se suele graficar la respuesta de \(H(\omega)\) en diagramas logarítmicos de amplitud y fase.
Sin perder generalidad podremos considerar que \(p_i\) y \(z_j\) son reales por lo que:
expresado como la función transferencia armónica:
con lo que:
Finalmente, por propiedades de los logaritmos, el módulo en dB se determina sumando los módulos individuales de los polos y ceros para cada frecuencia.
y la fase se obtiene sumando las fases de los polos y ceros en forma individual para cada frecuencia w.
El resultado anterior nos permite graficar un diagrama de Bode a partir de diagramas de Bode de sistemas mas simples. Analizaremos cada una de estas opciones tanto para polos como para ceros.
Método práctico para graficar diagramas de Bode#
1) Polo simple en el origen#
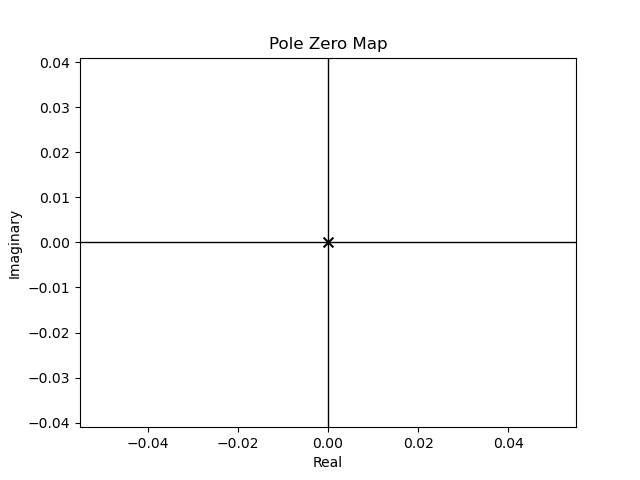
Figura 55 Polo en 0#
el módulo resulta
para frecuencia \(\omega = 1 \dfrac{rad}{seg}\) tenemos que el módulo es:
y la fase resulta
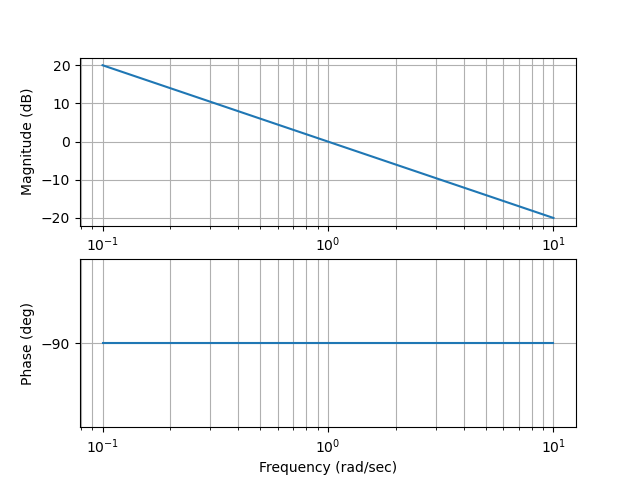
Figura 56 Bode de \(G(s)=\dfrac{1}{s}\)#
2) Polo múltiple en el origen#
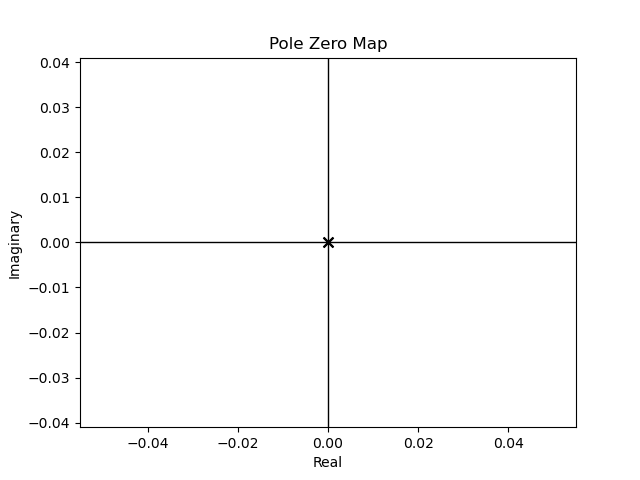
Figura 57 Polos de \(G(s)\) en \(s=0\) de multiplicidad \(n\)#
el módulo resulta
para frecuencia \(\omega = 1 \dfrac{rad}{seg}\) tenemos que el módulo es:
y la fase resulta
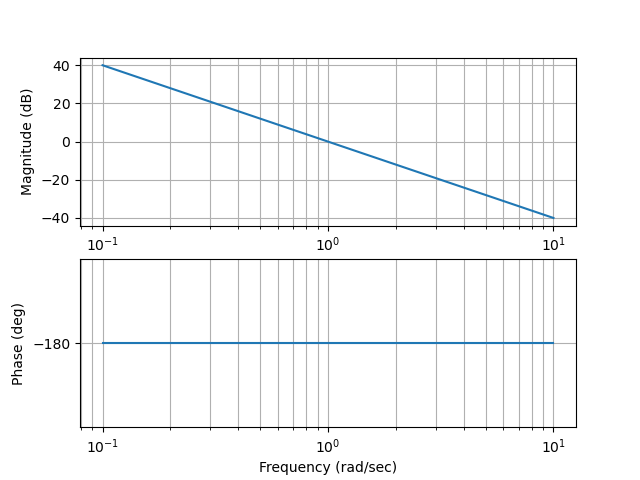
Figura 58 Bode cuando n=2, es decir \(G(s)=\dfrac{1}{s^2}\)#
3) Polo real simple#
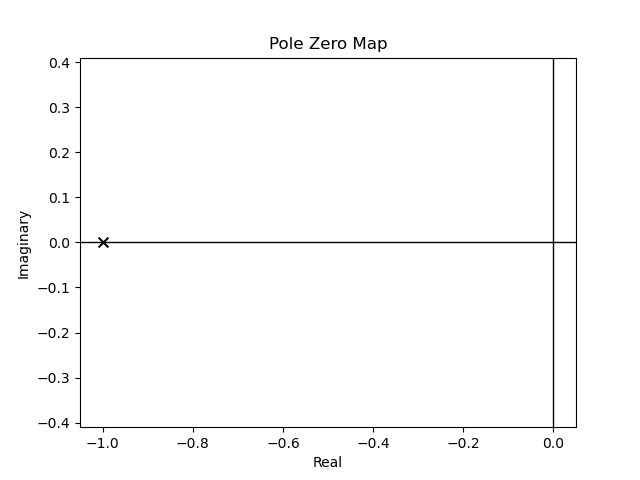
Figura 59 Polo de \(G(s)\) en \(s=-1/\tau\)#
el módulo resulta
cuando \(\omega \longrightarrow 0\) el módulo se puede aproximar a la asíntota:
para \(\omega \longrightarrow \infty\) el módulo puede aproximarse a la asíntota:
Notar que para \(\omega=\dfrac{1}{\tau}\) el módulo es:
la fase resulta ser:
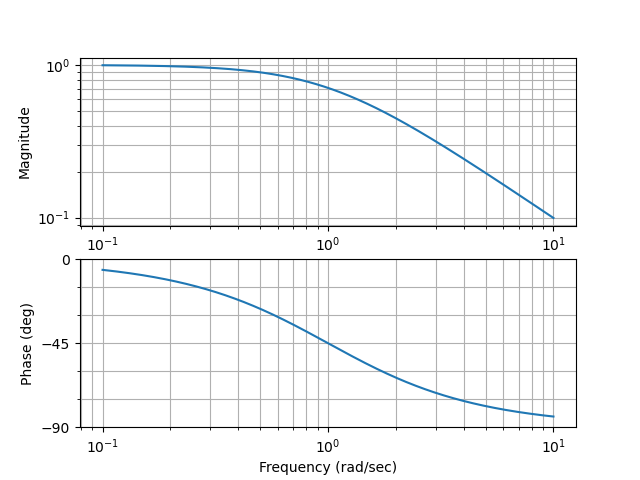
Figura 60 Bode de \(G(s)=\dfrac{1}{\tau s+1}\) con \(\tau=1\)#
4) Par de polos complejo conjugado#
donde \(\xi\) es el coeficiente de amortiguamiento, \(\omega_n\) es la frecuencia natural y los polos se ubican en \(\underbrace{p_{1,2}=-\xi\omega_n\pm \omega_n\sqrt{\xi^2-1}}_{\text{complejos conjugados}}\) para \(0<\xi<1\) y \(|p_{1,2}|=\omega_n\)
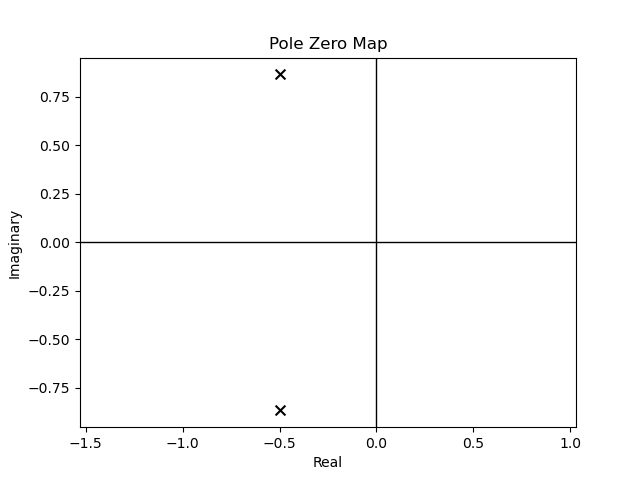
Figura 61 Polo complejos conjugados de \(G(s)\) con \(\omega_n=1\) y \(\xi=0.5\)#
el módulo es
cuando \(\omega \longrightarrow 0\) el módulo se puede aproximar a la asíntota:
y para \(\omega \longrightarrow \infty\) el módulo puede aproximarse a la asíntota:
El módulo para \(\omega=\omega_n\) es:
la fase es:
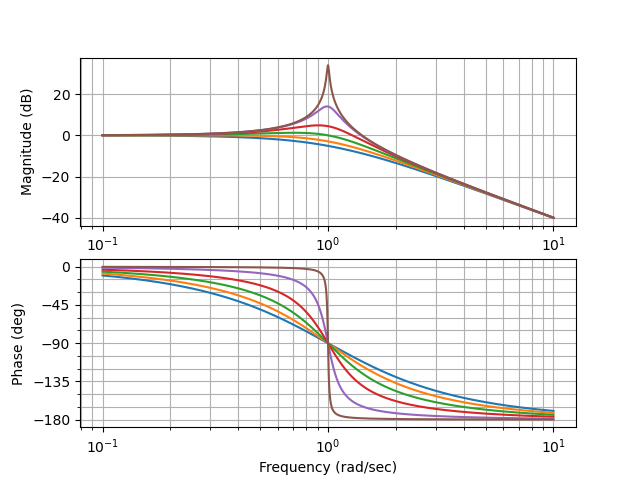
Figura 62 Bode de \(G(s)\) con \(\omega_n=1\) y \(\xi= 0.9,0.7,0.5,0.3,0.1,0.01\)#
5) Cero simple en el origen#
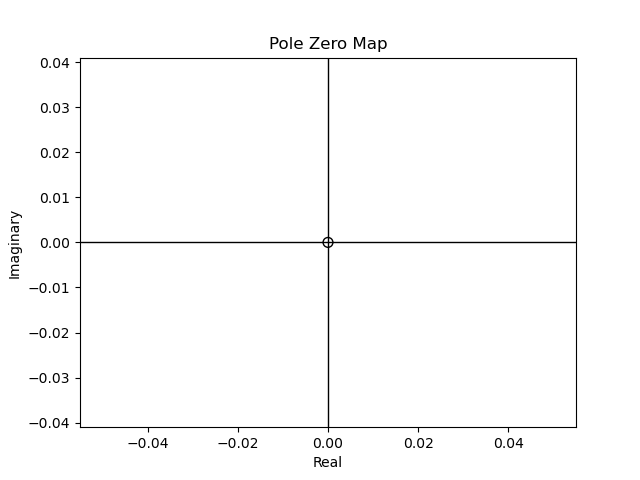
Figura 63 Cero de \(G(s)\) en \(s=0\)#
el módulo resulta
para
la fase \(\angle{G(j\omega)} = \dfrac{\pi}{2} ~\forall~ \omega\)
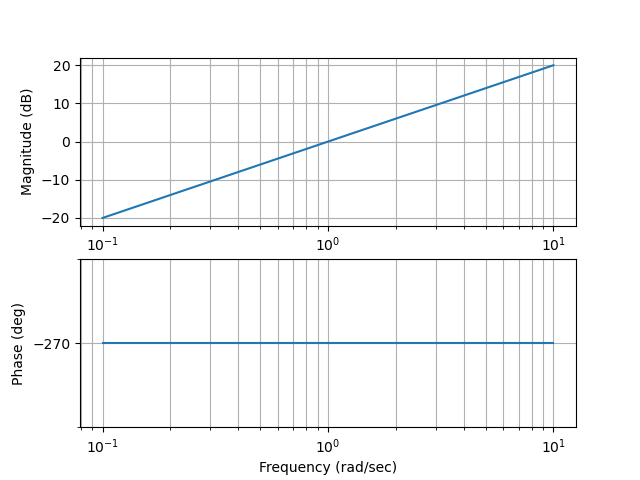
Figura 64 Bode de \(G(s)={s}\)#
6) Ceros múltiples en el origen#
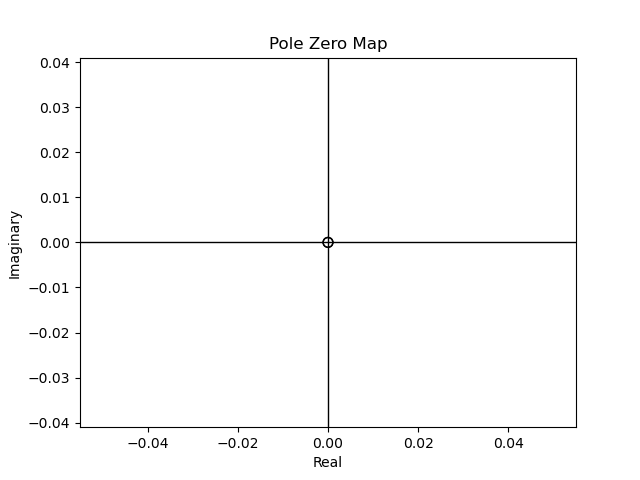
Figura 65 Ceros de \(G(s)\) en \(s=0\) de multiplicidad n#
el módulo resulta
sigue valiendo \(|G(j\omega)|_{\omega = 1 \dfrac{rad}{seg}} = 0 dB\)
y la fase resulta
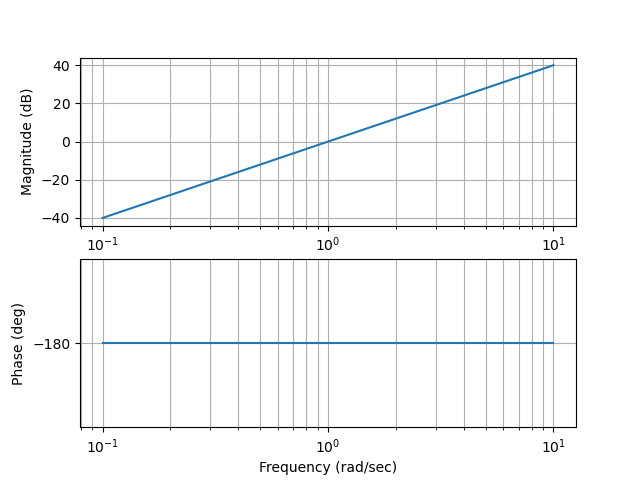
Figura 66 Bode cuando n=2, es decir \(G(s)={s^2}\)#
7) Cero real simple#
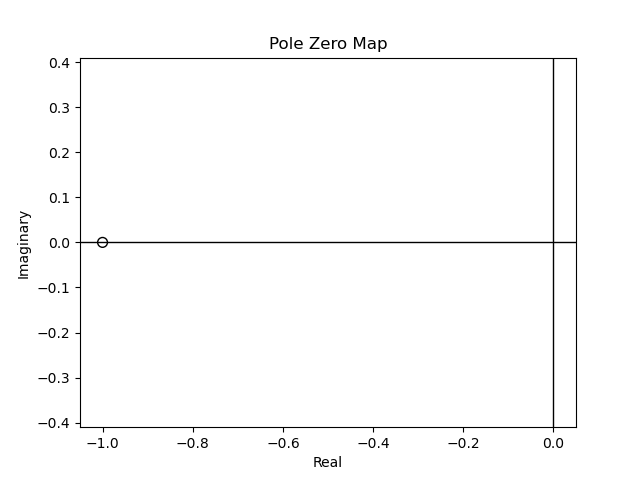
Figura 67 Cero de \(G(s)\) en \(s=-1/\tau\)#
el módulo resulta
cuando \(\omega \longrightarrow 0\) el módulo se puede aproximar a la asíntota:
para \(\omega \longrightarrow \infty\) el módulo puede aproximarse a la asíntota:
para \(\omega=\dfrac{1}{\tau}\) el módulo es:
la fase resulta ser:
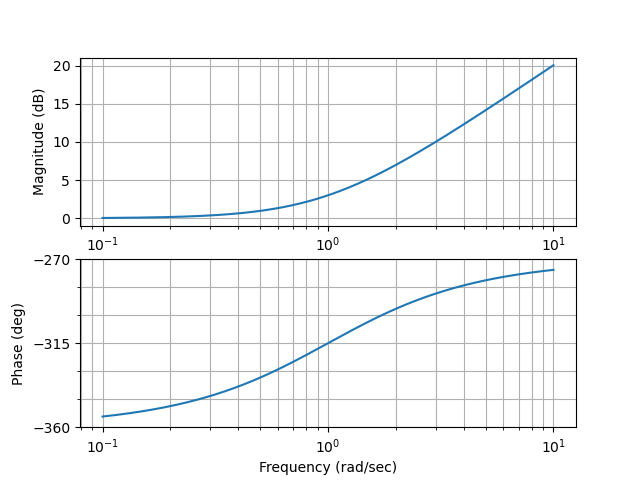
Figura 68 Bode de \(G(s)={\tau s+1}\) con \(\tau=1\)#
8) Cero complejo conjugado#
De forma similar a lo resuelto para los polos complejos conjugados, se puede llegar a que la respuesta en frecuencia de la siguiente función de transferencia con un para de ceros complejos conjugados normalizada en ganancia, es:
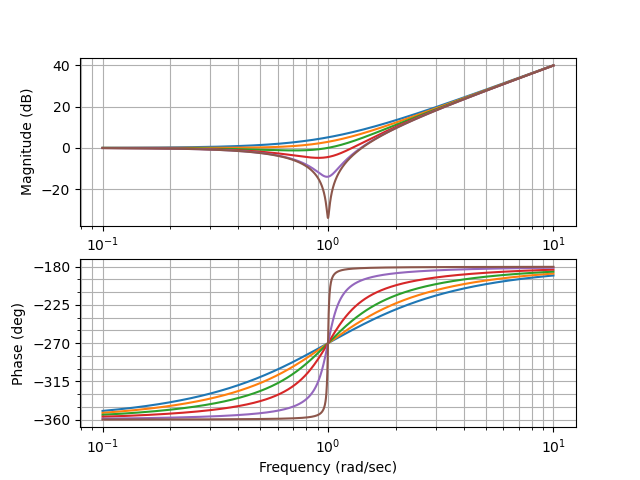
Figura 69 Bode de \(G(s)\) con \(\omega_n=1\) y \(\xi= 0.9,0.7,0.5,0.3,0.1,0.01\)#
9) Cero simple de no mínima fase#
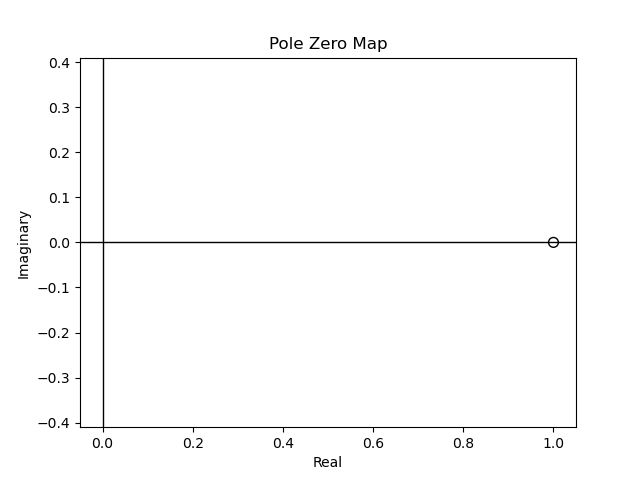
Figura 70 Cero de \(G(s)\) en \(s=1/\tau\), en \(\mathbb{C}^+\)#
el módulo resulta
cuando \(\omega \longrightarrow 0\) el módulo se puede aproximar a la asíntota:
para \(\omega \longrightarrow \infty\) el módulo puede aproximarse a la asíntota:
para \(\omega=\dfrac{1}{\tau}\) el módulo es:
la fase resulta ser:
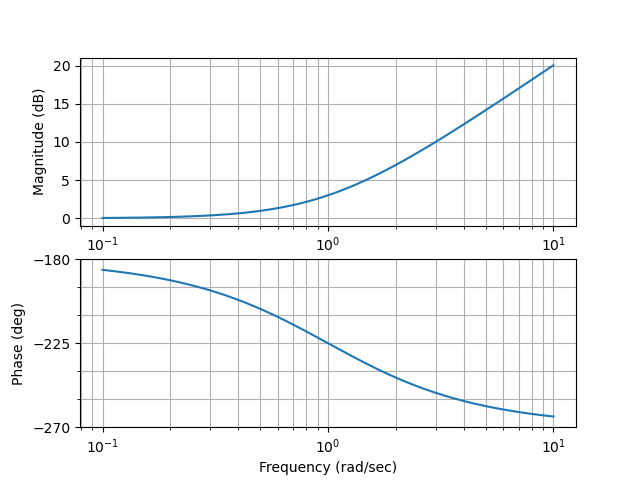
Figura 71 Bode de \(G(s)={1-\tau s}\) con \(\tau=1\)#
Pasos para dibujar un diagrama de Bode#
Manipular la función de transferencia \(G(s)\) para que quede de la forma:
Magnitud: Determinar las singularidades en el origen \(\Longrightarrow k_0(j\omega)^n\) (resultado de los polos y/o ceros de multiplicidad n) Graficar la asintota en baja frecuencia (\(n~x~20dB/dec\)) y calcular la magnitud de \(k_0\) a \(\omega = 1\)
Completar la magnitud extender las asintotas para bajas frecuencias hasta el primer punto de quiebre \(\Longrightarrow\) cambiar la pendiente en función del orden del o los polos y/o ceros de primer orden o segundo orden.
Dibujar el módulo aproximado sabiendo que los polos/ceros en el punto de quiebre, modifican en -3dB/3dB respectivamente y para los polos/ceros de segundo orden \(\Longrightarrow |G(j\omega)|_{dB} \approx \dfrac{1}{2}\xi\)
Graficar asintotas en baja frecuencia como \(\phi = n~90º\)
Aproximar como guía con saltos de \(\pm 90º\) para primer orden y \(\pm 180º\) para segundo orden en los puntos de quiebre de magnitud
Aproximar con una asintota el salto según corresponda
Se puede aproximar por una curva suave en forma aproximada.
Ejemplo: Primer Bode asintótico#
Seguimos los pasos anteriores para dibujar un Bode asintótico
step) reescribir la FT de la forma:
step) para bajas frecuencias tenemos que:
para \(\omega = 1 \Longrightarrow k_0=0.2 \Longrightarrow \approx -14dB\)
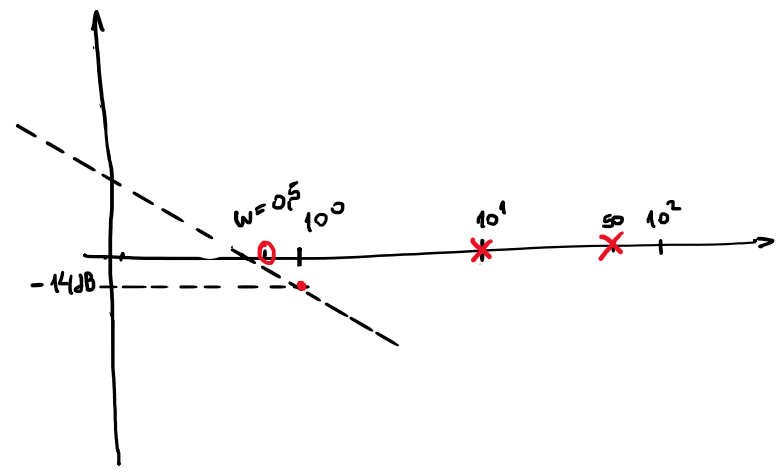
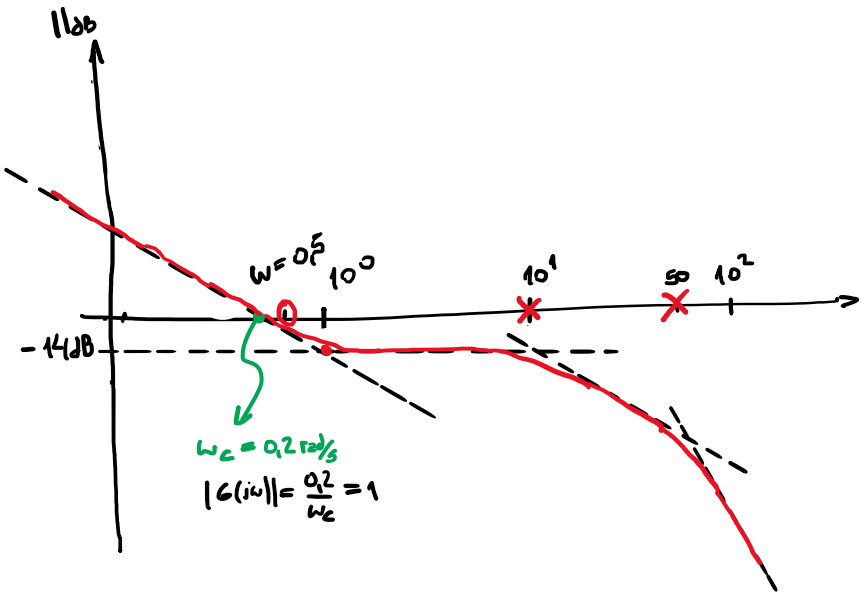
step) Dibujar las asíntotas
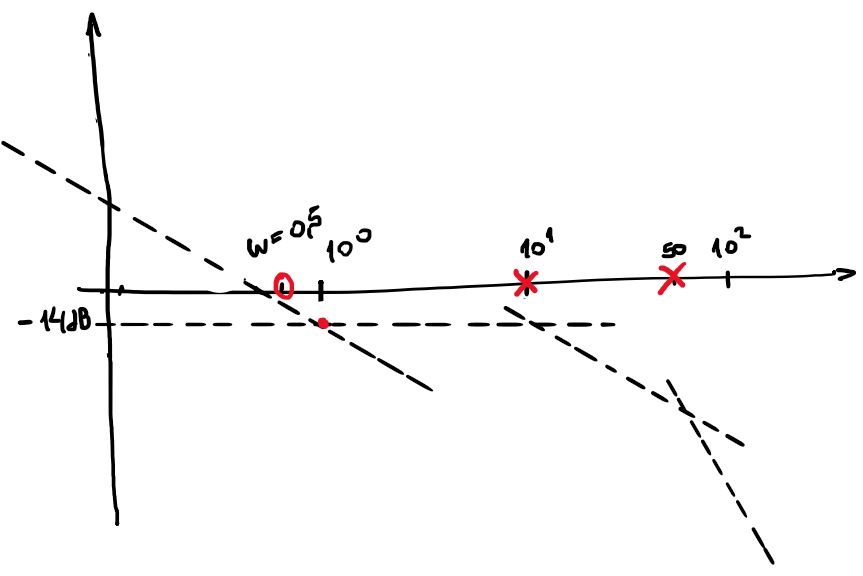
step) corrección del módulo en los puntos de quiebre
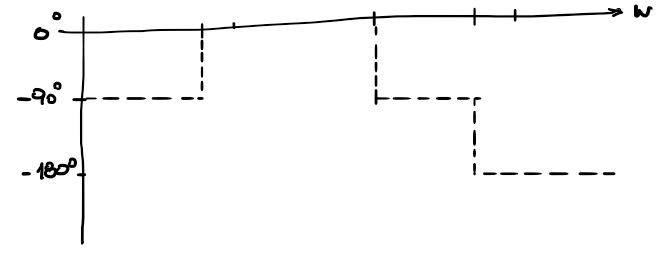
step) Fase a baja frecuencia el \(-90º\)
step) Graficar escalones en puntos de equilibrio
step) dibujar asíntotas, en verde la asintotas con una recta en +/- media decada.
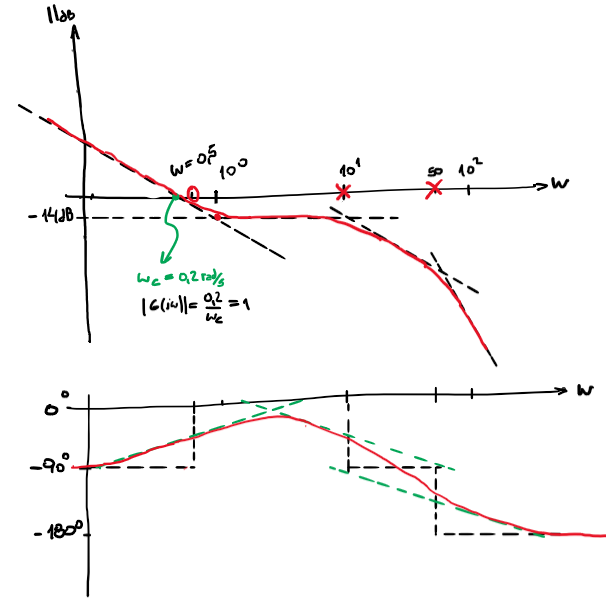
Figura 72 Bode asintótico#
Ejemplo:#
Graficaremos el Bode asintótico de la siguiente función de transferencia
La frecuencia de corte por 0dB se calcula

Figura 73 Bode asintótico de \(G(s)\)#